使用Inpho处理航飞正射数据的详细步骤
需积分: 22 13 浏览量
更新于2024-07-16
1
收藏 2.56MB DOCX 举报
"这篇文档详细介绍了如何使用Inpho软件处理航飞的正射数据,包括新建工程、创建相机文件、导入影像数据、导入POS文件、像控点数据的导入以及航条设置等关键步骤。"
Inpho是一款专业的航空遥感图像处理软件,它在航飞内业正射数据处理领域有着广泛的应用。通过本文档,用户可以学习到如何有效地操作Inpho进行数据处理。
首先,启动Inpho软件并新建工程,这是所有后续操作的基础。在“项目”菜单中选择“新建”,然后在弹出的对话框中确认设置,创建新的工程文件。
接下来是建立相机文件,这对于精确地解析影像至关重要。在“摄影机/传感器”下点击“加号”添加新相机,填写相关参数如相机名称、类型、镜头类型。在“传感器大小”中设定传感器的具体尺寸,并在“校准集1”中输入检校文件中的数据,确保像主点坐标值为零,完成相机文件的创建。
然后,导入未经畸变处理的影像数据。在“框幅类型”中选择“框幅像片”,通过“添加”功能导入影像文件,并在“地形高度”字段输入相控POS中地面的平均高度值,按提示逐步操作直至完成,点击“应用”和“确定”。
接着,导入POS文件,这包含了影像的位置信息。在对应的窗口中点击“导入”,选择CSV格式的POS文件,依次确认坐标匹配和设置,最终点击“完成”以完成POS数据的导入。
像控点数据的导入与导航数据相似,主要区别在于“标准差”设置。像控点的标准差通常设置为1/3个像元大小,确保精度。点击“应用”和“确定”来完成像控数据的设置。
最后,设置航条用于组织和处理影像序列。在“分组”下的“航条”选项中,点击“生成”,然后确认设置,这样就完成了航条的创建。
在所有设置完成后,记得保存工程文件,以便后续的工作。通过按照这些步骤操作,用户能够熟练掌握Inpho软件处理航飞正射数据的基本流程,从而提高工作效率。
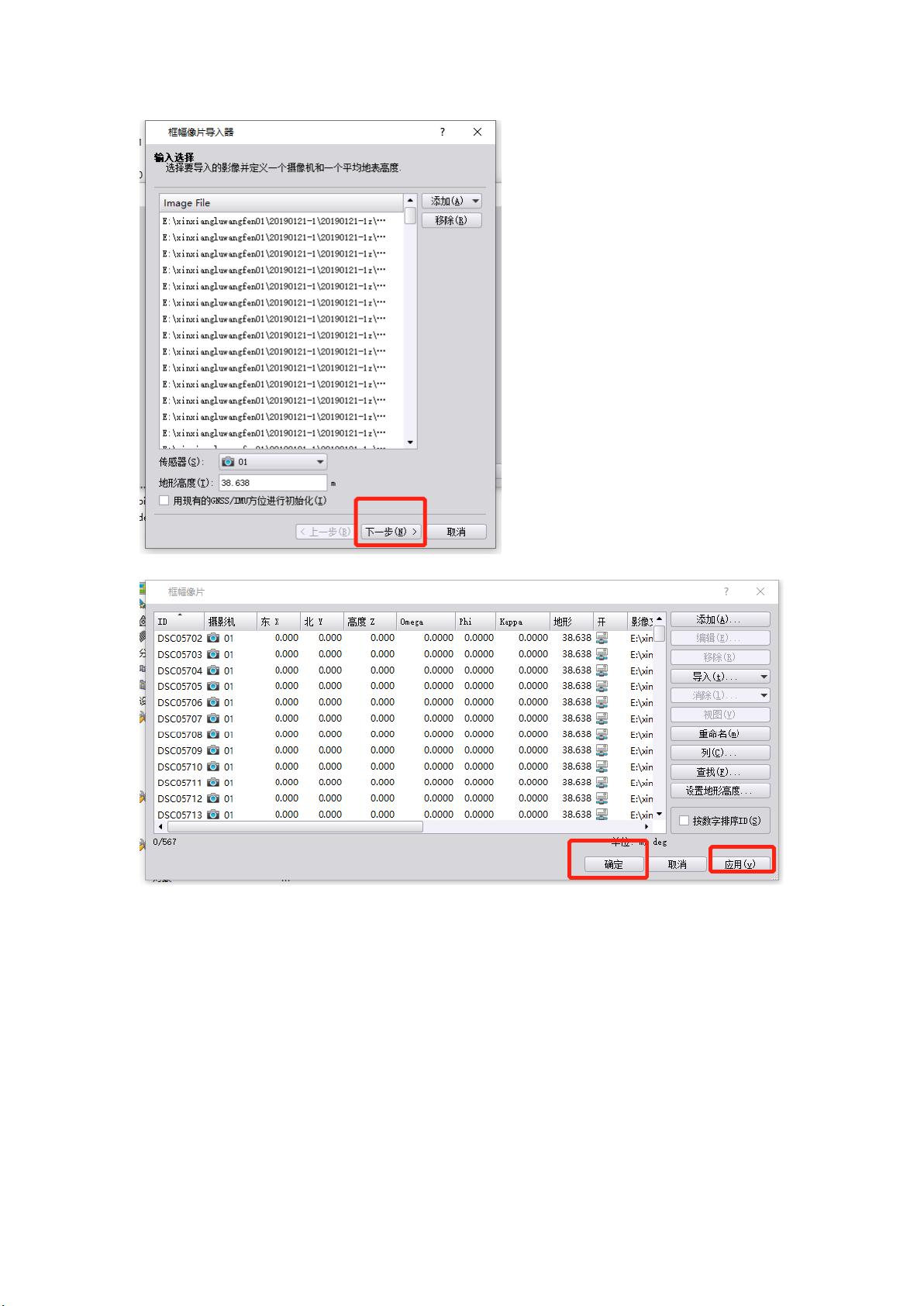
一直点击下一步按钮,最后点击完成按钮。设置完成后分别点击“应用”和确定按钮
此处,影像就导入工程完成了。
3.导入影像的 Pos 文件
剩余29页未读,继续阅读
2021-11-07 上传
113 浏览量
246 浏览量
2021-11-01 上传
563 浏览量
2023-02-23 上传

「已注销」
- 粉丝: 150
- 资源: 31
 我的内容管理
展开
我的内容管理
展开







最新资源
- PRO-C-27约束身体
- 高斯白噪声matlab代码-GalaxyGAN:银河
- iwms正式版 .Net2.0_新闻文章发布系统.rar
- readmalanew.zip_MALA_gpr mala matlab_mala探地雷达_探地雷达_探地雷达 matlab
- JS-square-number-trainer:HTML,CSS,JS,QUERY
- Tragic
- 同步压缩小波变换matlab相关程序.zip
- goQuality-dev-contents:{收集高质量的开发内容}
- lwc-modal:用于Salesforce.com(SFDC)的Lightning Web Components(LWC)系统的可访问,可组合模式
- CMPT-120L-902-21S
- 自定义视图可使用单击按钮或滑动从给定范围内选取一个值。-Android开发
- kalman.zip_SOC Kalman_algorithm battery_battery algorithm_soc es
- Tracer
- 通过u盘升级stm32固件
- Simple Task Organizer System using JavaScript
- pgcenter:用于观察和排除Postgres故障的命令行管理工具
