"三维重建与机器视觉技术综述"
下载需积分: 0 | PDF格式 | 1.44MB |
更新于2023-12-21
| 35 浏览量 | 举报
本课程旨在介绍运动恢复结构(Structure from Motion,SFM)的基本原理和方法。在图像处理领域,SFM是一项重要的技术,它可以利用摄像机捕捉的连续图像序列来重构出三维环境结构,达到三维重建的效果。
在课程中,我们首先介绍了利用摄像机内参数和基础矩阵F来求解本质矩阵E的原理和方法。摄像机内参数是指摄像机的焦距、主点位置和畸变参数等,而基础矩阵F是描述两个摄像机之间的几何关系的重要矩阵。通过这些参数,我们可以计算出本质矩阵E,从而为接下来的运动恢复结构提供基础。
接着,我们讨论了如何分解本质矩阵E以获得旋转矩阵R和平移矩阵T。这一步是SFM中非常关键的一步,因为旋转矩阵和平移矩阵可以帮助我们确定摄像机的姿态和位置,从而进一步推断出三维环境中物体的位置和结构。
在获得了摄像机的姿态和位置后,我们介绍了三角化的方法来求解三维点的坐标。通过在不同视角下观察同一个点,我们可以利用三角定律来计算出这个点在三维空间中的坐标,从而实现对三维环境的重建和重构。
在课程的最后,我们还涉及了机器视觉技术、语义信息、度量三维信息、像素、图像分割、摄像头、多视角几何和卷积边缘等相关内容。这些内容对于理解SFM的原理和应用都具有重要的意义,能够帮助学生更好地掌握SFM技术的核心知识和方法。
总的来说,本课程深入浅出地介绍了SFM的基本原理和方法,从摄像机参数的计算到三维点的重建,系统地阐述了SFM的整个流程。通过本课程的学习,学生将能够掌握SFM技术的核心概念和基本操作,为将来在图像处理和计算机视觉领域的研究和实践奠定坚实的基础。感谢CS231A课程团队在课程建设方面的工作,为我们提供了宝贵的学习资源和参考资料。 Beijiing University of Posts and Telecommunications School of Computer Science,Beijing University of Posts and Telecommunications 本课程三维重建篇所涉及的教学内容与课件参考了CS231A ,感谢CS231A课程团队在课程建设方面所做的工作!
2020/6/1 Beijing University of Posts and Telecommunications 14
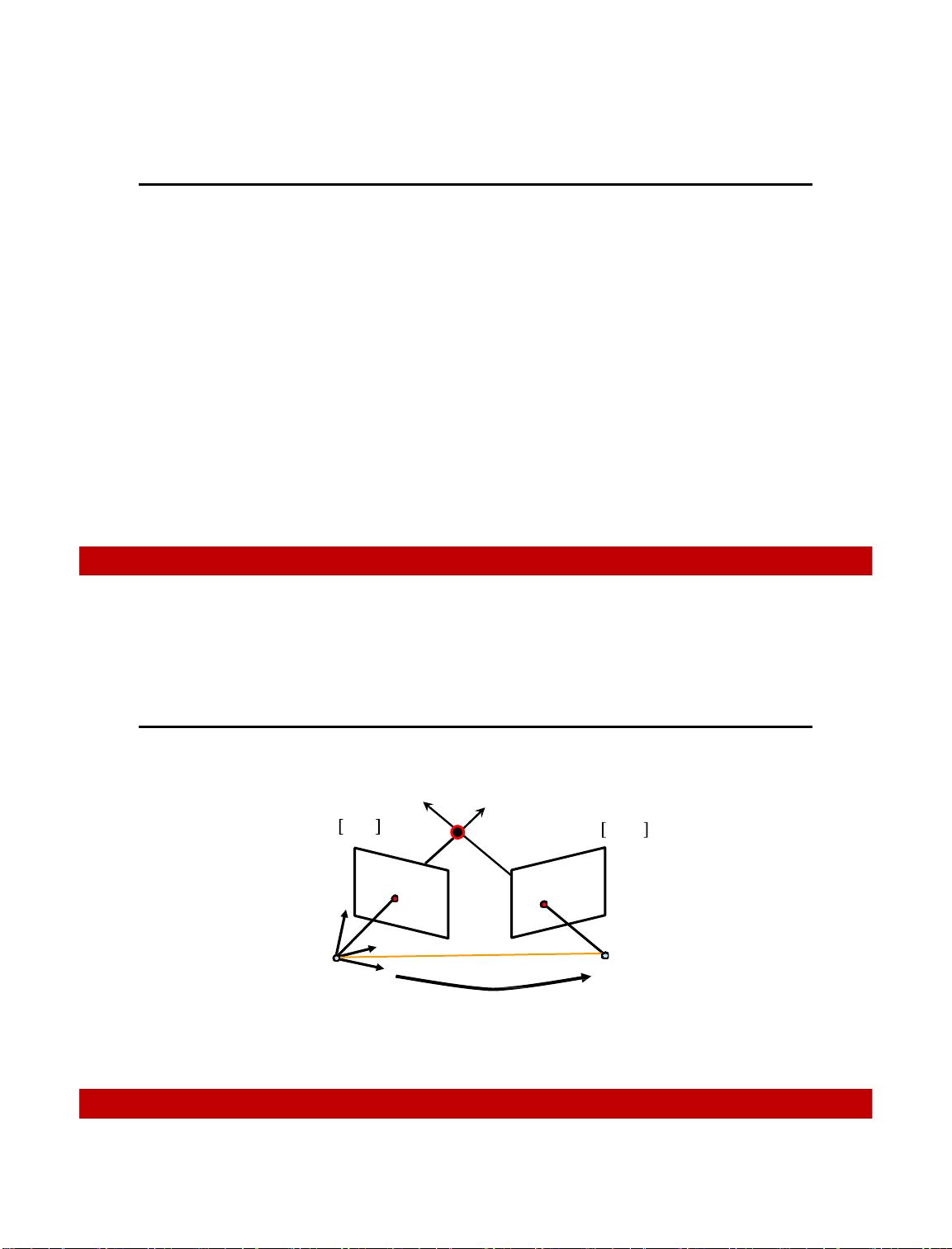
欧式结构恢复问题(两视图)
2020/6/1 Beijing University of Posts and Telecommunications 15
欧式结构恢复问题(两视图)
O
1
O
2
R, T
剩余43页未读,继续阅读
相关推荐





yiyi分析亲密关系
- 粉丝: 33
- 资源: 321
 我的内容管理
展开
我的内容管理
展开







最新资源
- 基于股票的一个Android应用(内含源码)
- Backstage-Management:使用Vue + Nodejs(express)构建的博客后台管理系统,做后台管理配置模板
- google-web-designer:使用HTML5CSS3JS技术进行响应式Google Web Designer HTML5标语的网页设计和开发,以便在台式机,笔记本电脑,平板电脑和智能手机等不同设备上使用现代互联网浏览器显示HTML5广告
- 运用市场调查资料
- SOCKET_C++_VS2013.rar
- gov-inventory-front-end:库存管理系统的前端
- 船舶制造业项目商业计划书.zip
- 市场调查表格——市场调查计划表(一)
- p3-timeless
- rt-thread-code-stm32f103-onenet-nbiot.rar,stm32f103-onenet-nbiot
- 网站
- cropmat:具有轴对齐的最小边界框的裁剪数组-matlab开发
- Bê tông Tươi và Dịch Vụ SEO Tamdaiphuc-crx插件
- icu4c-56_1-Win32-msvc10.zip
- 市场营销计划与控制
- lua-resty-msgpack:用于ngx_luastream_luaOpenResty的Lua消息包
