视觉里程计基础教程:从入门到实践
"这篇教程是关于视觉里程计(Visual Odometry,简称VO)的经典入门资料,由苏黎世大学的专家Davide Scaramuzza和Felix Fraundorfer撰写。他们对视觉里程计进行了深入研究,并在IEEE Robotics and Automation Magazine上发表了两篇重要的论文,分别是《Visual Odometry: Part I - The First 30 Years and Fundamentals》和《Visual Odometry: Part II - Matching, Robustness, and Applications》。教程主要关注通过分析车载摄像头图像序列或视频流中的运动变化来实时估计移动车辆的位姿。"
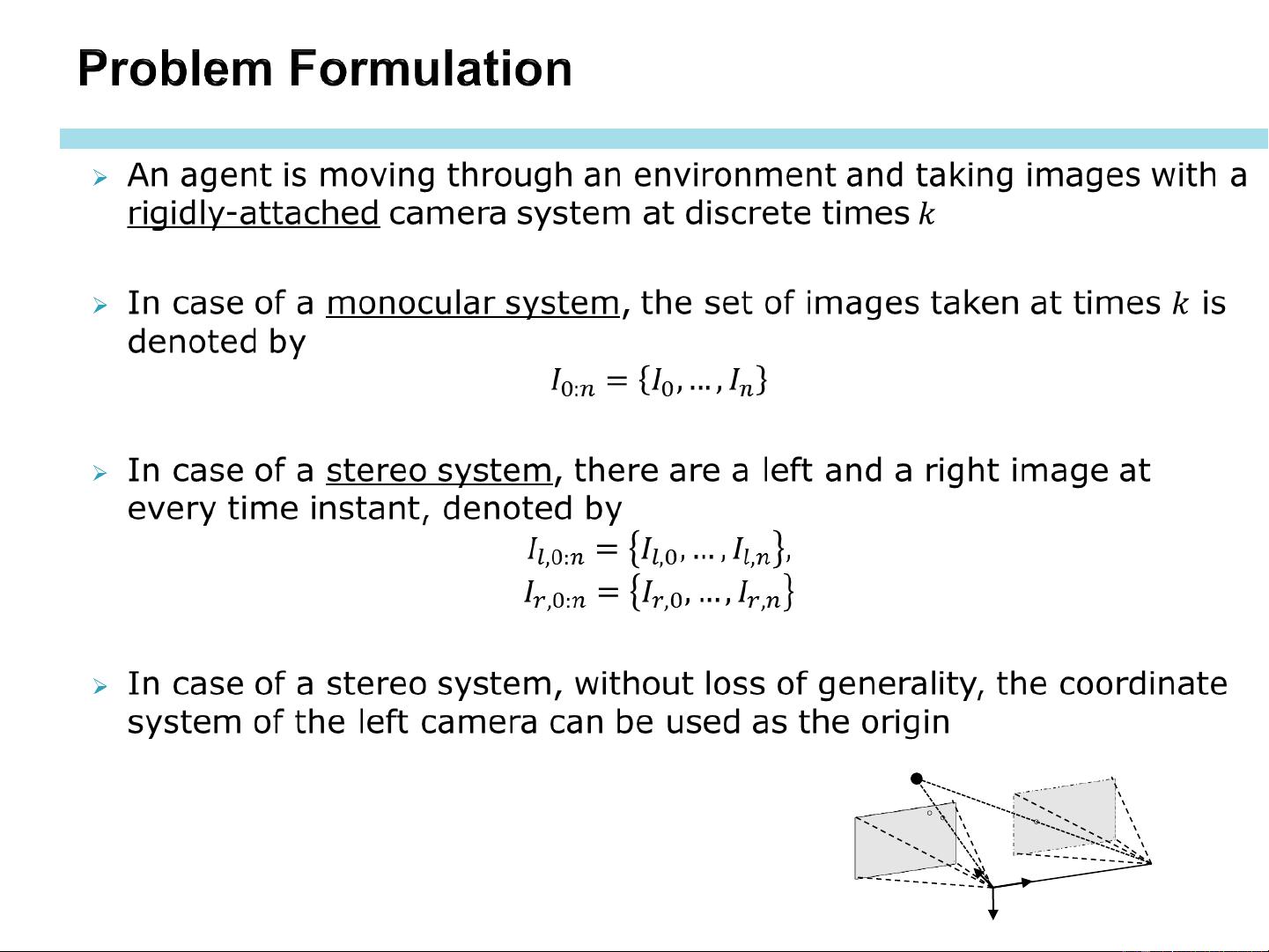
在视觉里程计中,输入通常是一个或多个摄像头捕捉到的连续图像序列或视频流,这些摄像头被安装在移动平台上。输出则是摄像头的轨迹,如果进一步处理,还可以获取到环境的3D结构信息。
1. **视觉里程计的基本概念**:
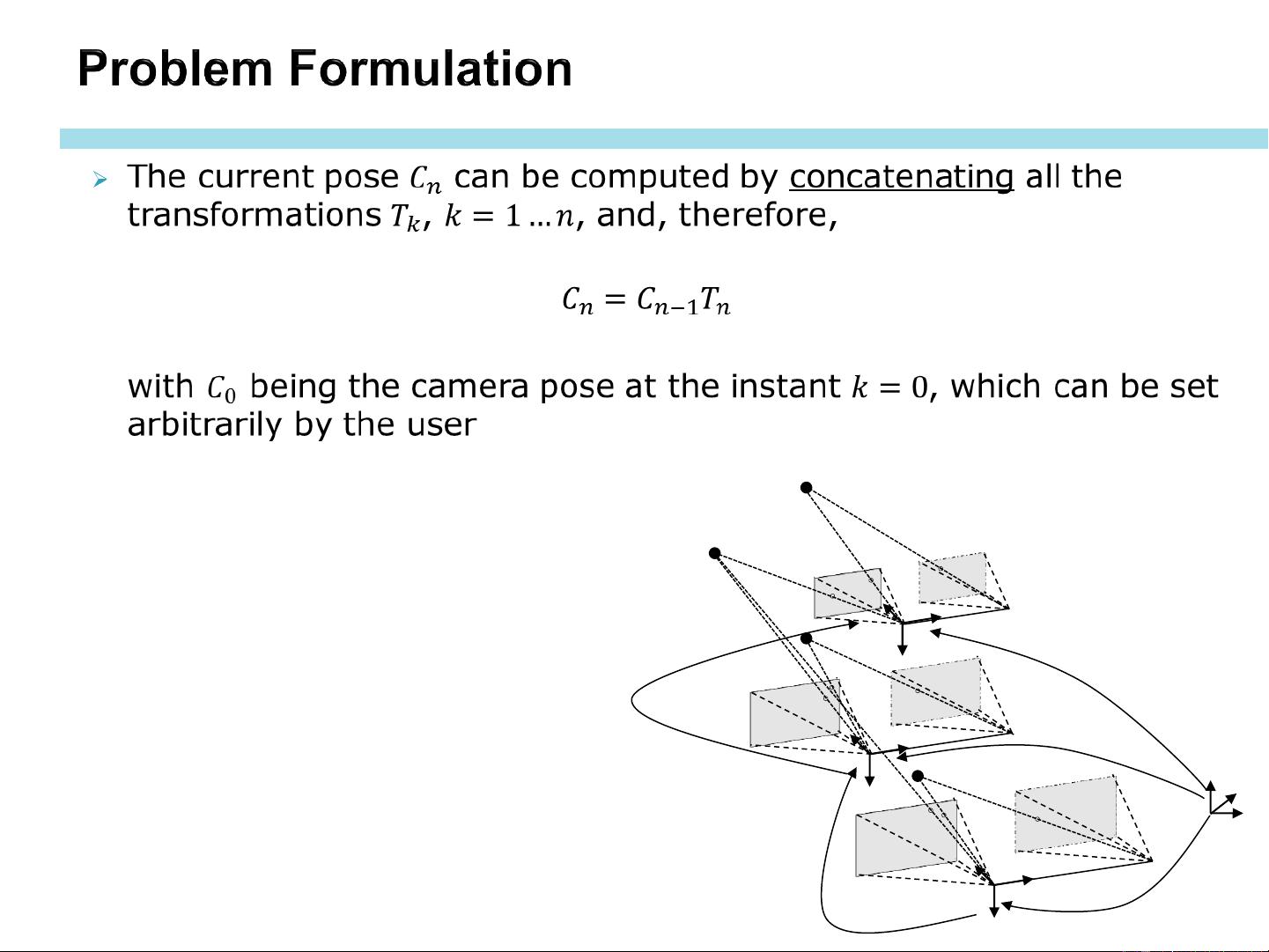
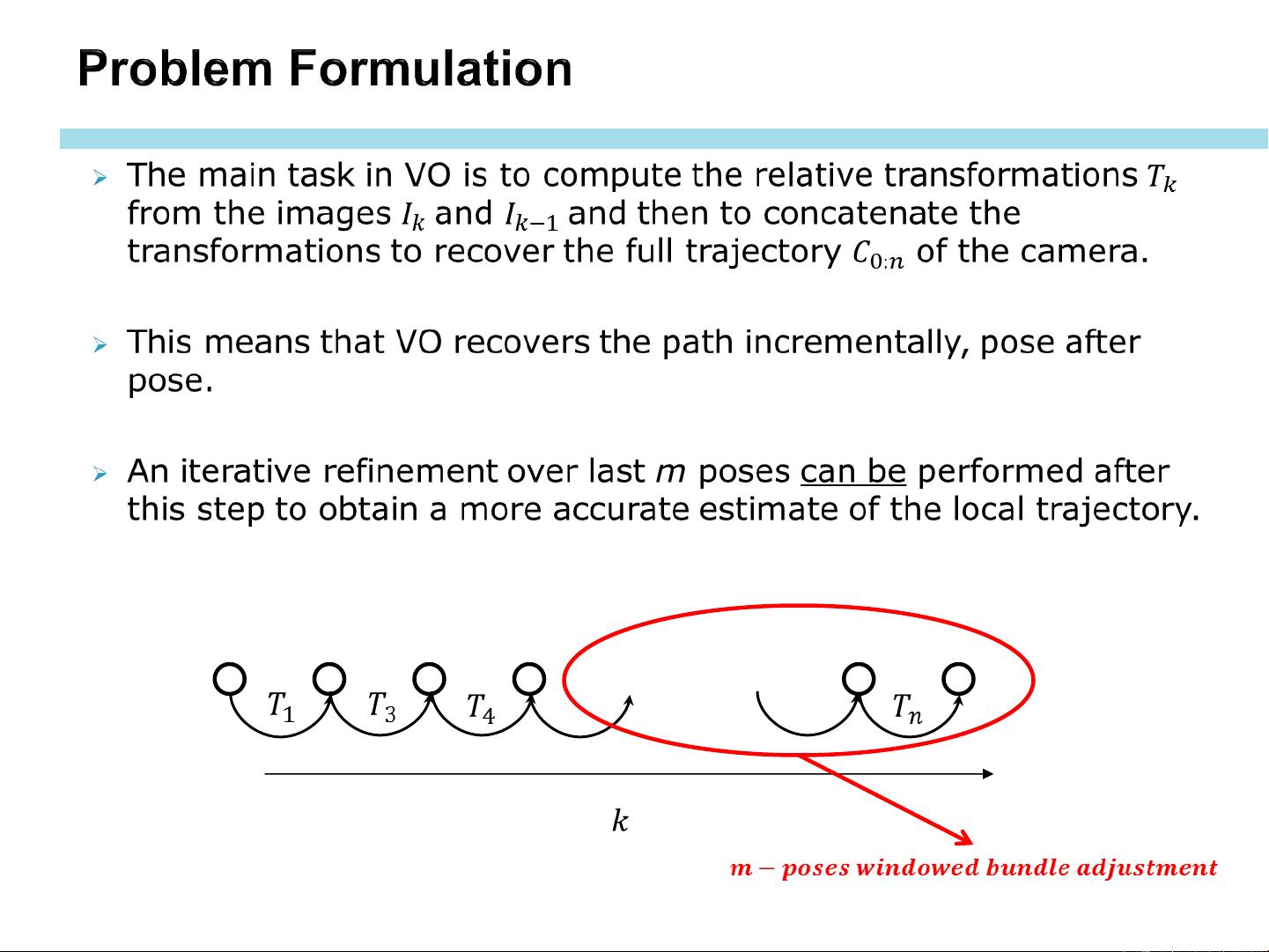
视觉里程计是一种基于视觉传感器的定位技术,它利用摄像头捕获的图像序列,通过分析相邻帧之间的特征匹配和几何关系,来实时估算相机相对于起始位置的运动轨迹。这种技术广泛应用于无人车辆、无人机以及机器人导航等领域。
2. **历史与基础**:
Scaramuzza和Fraundorfer的Part I论文回顾了视觉里程计的前三十年发展历程,概述了该领域的基本原理,包括特征检测、匹配、运动估计等核心问题。
3. **关键步骤**:
- **特征提取**:图像中的关键点,如SIFT、SURF或ORB等特征,用于在不同帧之间建立对应关系。
- **特征匹配**:找到两帧间相同物体的关键点,通过匹配算法如BFMatcher或FLANN进行匹配。
- **几何验证**:使用RANSAC等方法剔除错误匹配,提高匹配的稳定性。
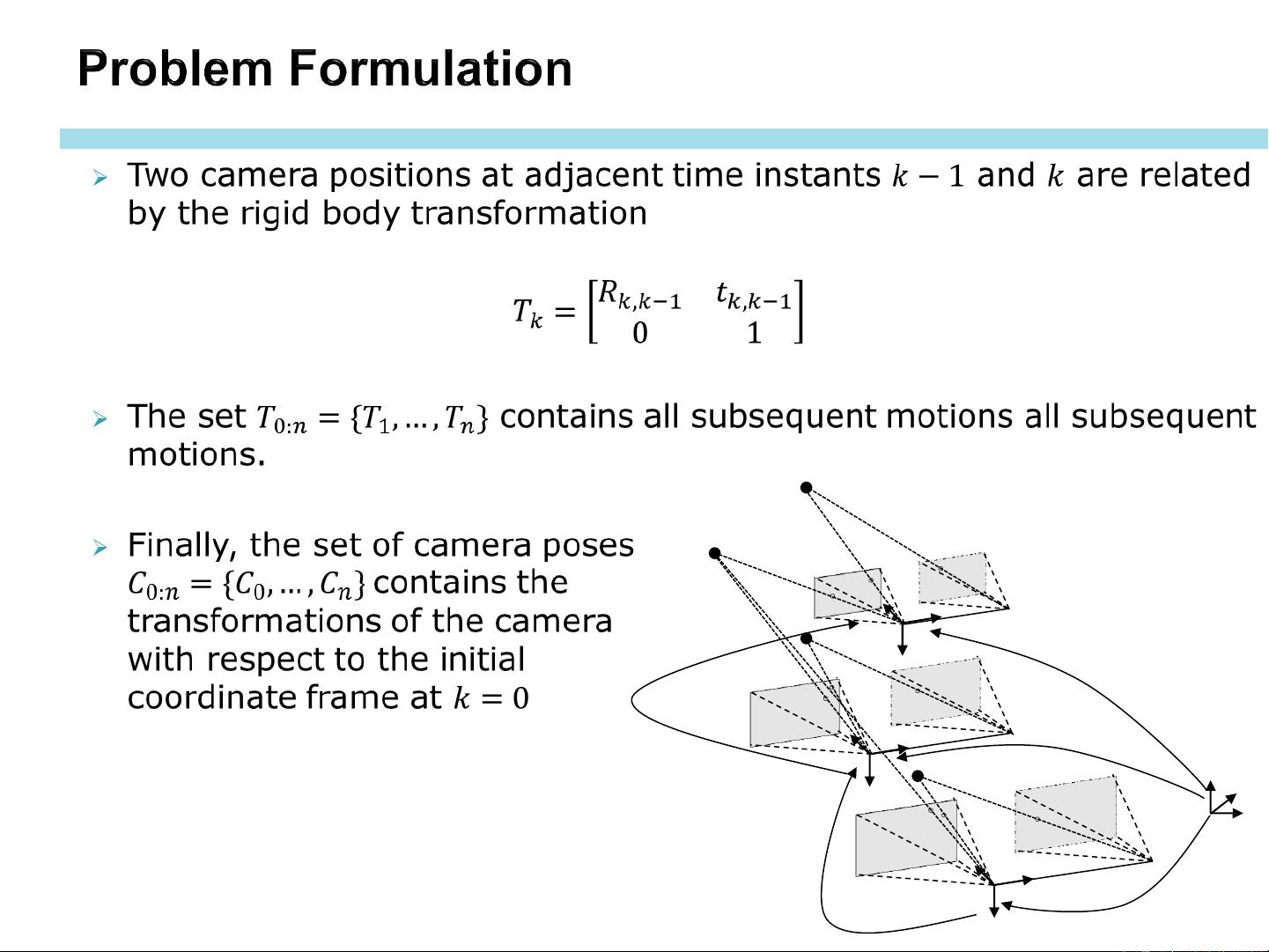
- **运动估计**:利用匹配的关键点构建几何模型(如单应性矩阵或本质矩阵),解算相机的旋转和平移。
4. **鲁棒性和应用**:
Part II论文则着重讨论了匹配的鲁棒性、噪声处理以及视觉里程计在实际应用中的挑战,如光照变化、动态物体和视场遮挡等问题,并展示了视觉里程计在机器人自主导航、三维重建等多个领域的应用实例。
5. **系统集成**:
实际的视觉里程计系统还需要考虑传感器融合,比如与IMU数据结合,以提高定位的精度和稳定性。同时,闭环检测和重定位技术也是优化系统性能的重要手段。
Davide Scaramuzza和Felix Fraundorfer的教程为初学者提供了一个全面了解和掌握视觉里程计的平台,不仅介绍了基本理论和技术,也涵盖了该领域的最新进展和挑战。对于希望深入研究SLAM(Simultaneous Localization And Mapping)或者机器人自主导航的读者来说,这是一份非常宝贵的参考资料。
Copyright of Davide Scaramuzza - davide.scaramuzza@ieee.org - https://sites.google.com/site/scarabotix/
T
k,k-1
剩余93页未读,继续阅读
2019-09-08 上传
2021-09-30 上传
2019-05-13 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

暮色渐起
- 粉丝: 7
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++ Qt影院票务系统源码发布,代码稳定,高分毕业设计首选
- 纯CSS3实现逼真火焰手提灯动画效果
- Java编程基础课后练习答案解析
- typescript-atomizer: Atom 插件实现 TypeScript 语言与工具支持
- 51单片机项目源码分享:课程设计与毕设实践
- Qt画图程序实战:多文档与单文档示例解析
- 全屏H5圆圈缩放矩阵动画背景特效实现
- C#实现的手机触摸板服务端应用
- 数据结构与算法学习资源压缩包介绍
- stream-notifier: 简化Node.js流错误与成功通知方案
- 网页表格选择导出Excel的jQuery实例教程
- Prj19购物车系统项目压缩包解析
- 数据结构与算法学习实践指南
- Qt5实现A*寻路算法:结合C++和GUI
- terser-brunch:现代JavaScript文件压缩工具
- 掌握Power BI导出明细数据的操作指南
