Python库pcg_gazebo_pkgs:Gazebo模拟模型与世界的快速原型设计
 已收录资源合集
已收录资源合集
需积分: 0 98 浏览量
更新于2024-07-15
收藏 2.56MB PDF 举报
"roscon2019演讲:pcg_gazebo_pkgs介绍"
ROSCon 2019 演讲中提到的 pcg_gazebo_pkgs 是一个Python库,专门用于Gazebo仿真环境中的模型和世界的快速原型设计与脚本编写。这个库由Musa Morena Marcusso Manhães在Bosch Corporate Research的Robotics Systems Department开发,旨在解决非仿真专家在Gazebo中进行快速模拟原型设计的问题。
**Gazebo简介**
Gazebo是一款开源的机器人仿真软件,广泛用于机器人研究和开发。它能够模拟复杂的环境,包括物理动力学、光照、传感器等,为机器人系统提供真实世界的行为模拟。Gazebo支持多种机器人模型和场景的创建,并且与Robot Operating System (ROS) 集成紧密,方便用户进行开发和测试。
**pcg_gazebo_pkgs的功能**
1. **模型和环境管理**:通过Python接口,pcg_gazebo_pkgs允许用户轻松地创建、编辑和管理Gazebo中的模型和环境,提供了一种抽象化的高级接口,简化了与Gazebo交互的复杂性。
2. **快速原型设计**:对于非仿真专家,该库提供了工具来快速生成和设计新的或多个不同的仿真场景,允许调整物理引擎参数、机器人组件和结构,以及对象的放置位置。
3. **SDF和URDF支持**:pcg_gazebo_pkgs支持使用Simulation Description Format (SDF) 和 Unified Robot Description Format (URDF) 进行模型和世界描述的导入和导出。这两种格式是Gazebo和ROS中标准的建模语言,使得模型在不同项目间可复用。
4. **脚本化**:库的核心是使用Python作为脚本语言,允许用户编写自定义的生成规则和逻辑,实现对仿真环境的程序化控制。
5. **抽象数据结构**:pcg_gazebo_pkgs创建了Gazebo模型、世界和配置数据结构的抽象层,简化了处理Gazebo配置和设置的过程。
**应用场景**
1. **教学和培训**:对于教育和培训环境,pcg_gazebo_pkgs可以帮助快速构建和修改训练场景,使学生能专注于学习和理解机器人行为,而非花费大量时间在环境搭建上。
2. **研发**:在研发过程中,快速迭代和测试是关键,pcg_gazebo_pkgs可以加速这一过程,尤其在需要测试不同物理参数、环境条件或机器人配置的情况下。
3. **自动化测试**:自动化测试环境中,可以使用pcg_gazebo_pkgs快速生成多样化和复杂的测试场景,提高测试覆盖率。
**总结**
pcg_gazebo_pkgs是Gazebo仿真生态系统的一个强大工具,通过提供Python接口和脚本化功能,降低了Gazebo的使用门槛,提高了机器人开发者和研究人员的效率。它的应用不仅限于学术研究,也广泛适用于工业界,特别是在需要快速创建和调整仿真场景的项目中。
Musa Morena Marcusso Manhães | 31.10.2019
ROSCon 2019 Macau
© Robert Bosch GmbH 2019. All rights reserved, also regarding any disposal, exploitation, reproduction, editing, distribution, as well as in the event of applications for industrial property rights.
pcg_gazebo_pkgs
5
[1] Source: https://www.iconfinder.com/iconsets/brainy-mixed
License: https://creativecommons.org/licenses/by/3.0/
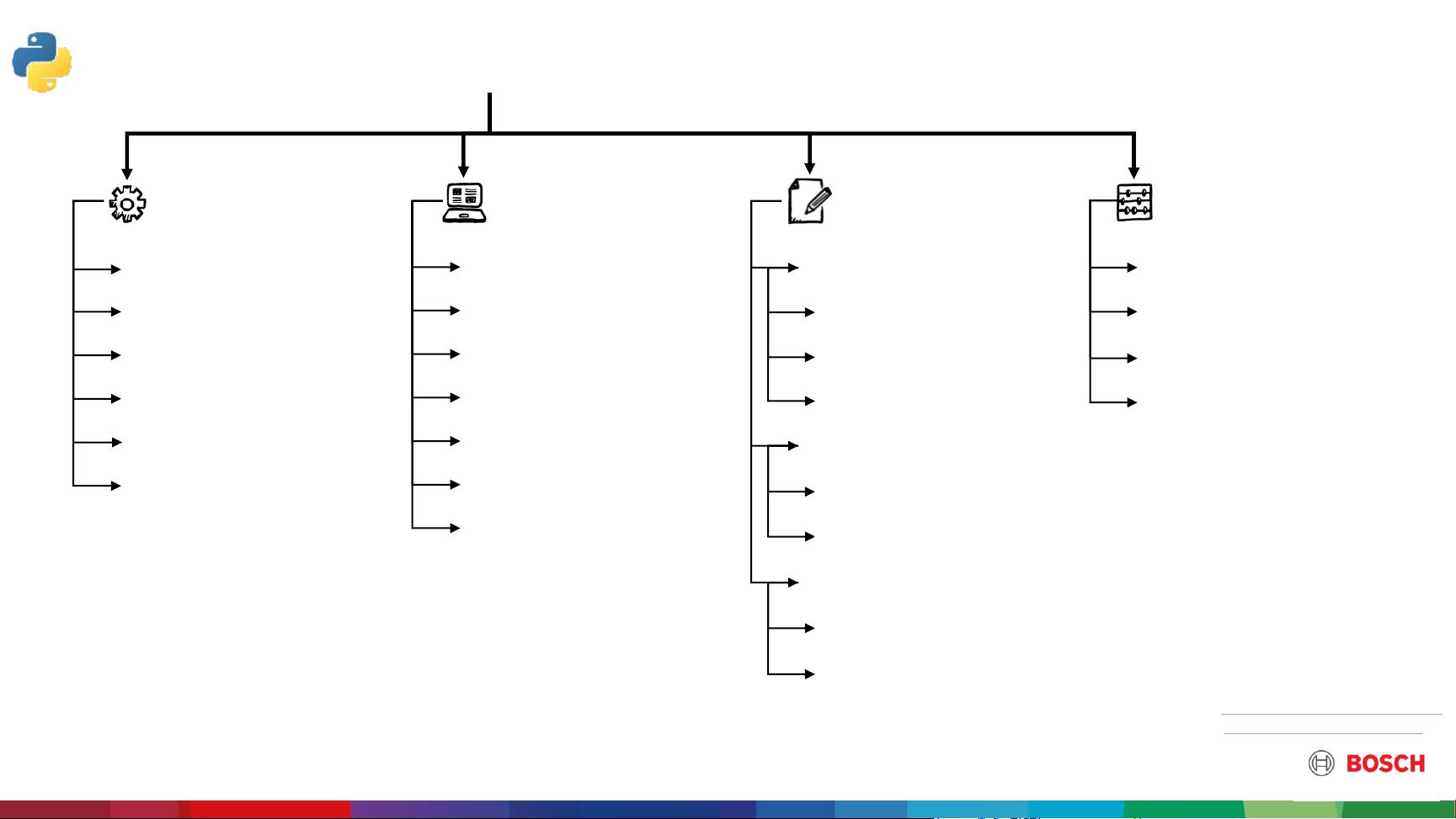
generators
model_factory
model_group_generator
world_generator
assets_manager
engines_manager
constraints_manager
[1]
models
links
joints
physics
sensors
lights
properties
simulation
[1]
parsers
sdf
urdf
template_processors
jinja
xacro
sdf_config
importer/exporter
converters
sdf2urdf
urdf2sdf
[1]
task_manager
gazebo_proxy
process_manager
stages
tasks
[1]
剩余20页未读,继续阅读
2022-01-14 上传
2022-02-20 上传
2022-05-08 上传
2022-01-06 上传
2021-05-26 上传
点击了解资源详情
2021-05-28 上传
2022-09-23 上传
2022-09-23 上传

寒墨阁
- 粉丝: 5160
- 资源: 33
 我的内容管理
展开
我的内容管理
展开







最新资源
- JavaScript实现的高效pomodoro时钟教程
- CMake 3.25.3版本发布:程序员必备构建工具
- 直流无刷电机控制技术项目源码集合
- Ak Kamal电子安全客户端加载器-CRX插件介绍
- 揭露流氓软件:月息背后的秘密
- 京东自动抢购茅台脚本指南:如何设置eid与fp参数
- 动态格式化Matlab轴刻度标签 - ticklabelformat实用教程
- DSTUHack2021后端接口与Go语言实现解析
- CMake 3.25.2版本Linux软件包发布
- Node.js网络数据抓取技术深入解析
- QRSorteios-crx扩展:优化税务文件扫描流程
- 掌握JavaScript中的算法技巧
- Rails+React打造MF员工租房解决方案
- Utsanjan:自学成才的UI/UX设计师与技术博客作者
- CMake 3.25.2版本发布,支持Windows x86_64架构
- AR_RENTAL平台:HTML技术在增强现实领域的应用
