晶圆搬运机械手的运动学仿真与轨迹规划
需积分: 50 158 浏览量
更新于2024-09-09
1
收藏 655KB PDF 举报
本文主要探讨了一种晶圆搬运机械手的运动学仿真研究,针对实际工业应用中的挑战,尤其是在半导体工厂中,晶圆搬运过程中对精确运动控制的需求。首先,文章详细介绍了机械手的设计,包括其三维建模,借鉴人体手臂的结构,由执行机构、驱动机构和控制机构构成。执行机构由大臂、腕部和手爪组成,通过关节连接实现运动传递和转换,驱动机构由四个并联电机驱动,确保了机械手的多维度运动,如上下、旋转和平移。
机械手的运动原理分析中,强调了末端执行器的独立工作以及它们之间的协同作用。电机1-3分别驱动不同的轴,使得大臂、腕部和手爪能够按照预设轨迹运动。电机4则控制丝杠和滑块,进而控制末端执行器的高度。轨迹规划是关键环节,通过将机械手的动作分解为抓取、移动、释放和旋转四个步骤,实现了对搬运过程的精确控制。
作者利用计算机辅助仿真技术,如ADAMS软件,对这种复杂的机械手运动学进行仿真研究。这种方法相比传统的物理样机制作和调试,可以节省大量的时间和成本,提高设计效率和精度。通过仿真,可以预先测试机械手在各种预期工况下的性能,优化运动策略,确保在搬运晶圆时能实现快速、准确和高效。
本文的核心内容在于深入解析了晶圆搬运机械手的运动学模型,通过数学计算得出运动方程,并借助仿真工具进行运动轨迹规划,以解决实际生产中的精确控制问题,对于提升半导体工厂的自动化水平和技术效率具有重要意义。
2014 / 5
机械制造
52
卷 第
597
期
收稿日期!
!"#!
年
""
月
专题报导
专题报导
机器人运动学描述了机器人关节与组成机器人的
各刚体之间的运动关系" 主要包括机器人末端执行器
的位姿分析#速度分析#加速度分析等$ 当已知所有关
节变量时" 可用正运动学来确定机器人末端执行器的
位姿
$ 要使机器人末端执行器在特定点上并且具有特
定的位姿"可用逆运动学来计算关节变量的值"以此实
现对机器人的运动学分析$
在某些半导体加工厂" 加工过程中常用机械手负
责晶圆的搬运" 以实现晶圆在不同工位之间快速%准
确#高效的转移"由于机械手末端执行器运动复杂"位
姿要求精准" 很难通过数学方法描述输入与输出端的
的运动关系" 在传统设计中常用物理样机的反复调试
来达到预定的输出"不仅费时#费力"还增加大量成本&
计算机辅助仿真提供了一种便捷的方法" 笔者根据项
目经验
#
运用
$%$&’
仿真软件"对晶圆搬运机械手运
动仿真部分进行了研究&
1
机械手运动原理分析及轨迹规划
"("
机械手三维建模及运动原理分析
机械手采用
)*+(,
建模" 参照人体手臂的原理"
主要由执行机构%驱动机构%控制机构
!
部分组成& 执
行机构主要包括大臂%腕%手爪’执行器("通过关节连
接" 实现运动的传递及转换" 通过调节驱动机构的输
入
"使末端执行器实现空间位姿$ 机械手驱动机构为
-
个并联电机"其中
"
个电机驱动机械手作上下运动"另
外
!
个电机驱动机械手作旋转运动或直线运动" 各电
机相互独立"互不干扰$
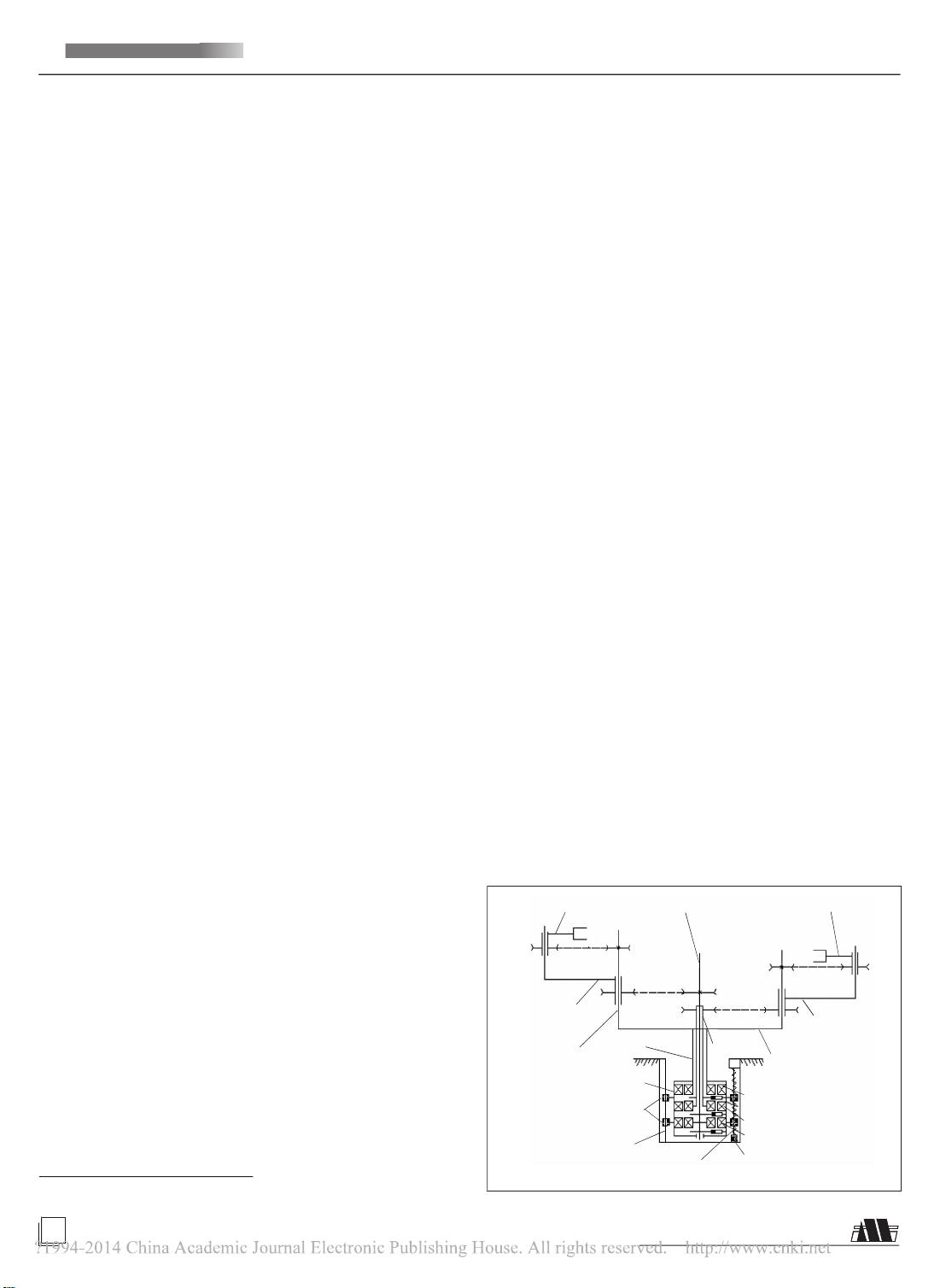
图
"
为机械手结构示意图" 机械手有
.
个末端执
行器"
.
个末端执行器并行工作"互不干扰$ 电机
"
与
轴
"
固接"驱动大臂
"
和大臂
.
转动)大臂
"
和大臂
.
耦合"分别驱动末端执行器
"
与末端执行器
.
转动)末
端执行器
"
绕腕
"
转动"末端执行器
.
绕腕
.
转动$电
机
.
与轴
.
固接"当电机
.
转动时"轴
.
通过耦合"驱
动腕
"
转动$ 电机
!
与轴
!
固接"当电机
!
转动时"轴
!
通过耦合"驱动腕
.
转动$腕
"
%腕
.
分别绕大臂
"
和
大臂
.
转动$ 另外"电机
-
驱动丝杠转动"丝杠通过滑
块带动电机定子沿机架上下运动" 从而控制末端执行
器的高度$
"/.
机械手运动轨迹规划
机械手的轨迹规划是根据作业任务的要求" 对机
械手的运动路径和轨迹进行描述$ 结合机械手的实际
工况"机械手的工作运动过程可概括为
-
个步骤!
①
机
械手从零位伸出手臂到存储室)
②
机械手抓取物体)
③
收回手臂)
④
旋转到指定位置"伸出手臂到加工室放置
物体$ 图
.
为机械手
-
个步骤的工作示意图$
机械手在工作过程中主要进行
!
个动作"即旋转%
伸臂%缩臂$ 由图
"
机械手结构原理得知"机械手运动
达到目标位置"在作旋转运动时"不能使末端执行器与
大臂%腕发生相互运动"只能整体转动)在作伸臂%缩臂
运动时"执行器只能作直线运动"不能发生转动$
一种晶圆搬运机械手的运动学仿真研究
□ 唐 超
贵州航天林泉电机有限公司 控制工程部 贵阳
,,0001
摘 要: 对一种搬运机械手的结构及相关参数进行了设计,介绍了该机械手的运动原理,运用代数法对机械手的关节
角和末端执行器坐标之间的关系进行了数学计算, 得到了机械手的运动学方程。 结合机械手的实际工况, 运用
$%$&’
软
件对机械手进行了正向运动学与逆向运动学仿真分析
, 得到了机械手的相关动态参数, 为机械手的控制提供了科学依据。
关键词:搬运机械手 运动学仿真
ADAMS
中图分类号
234".!
文献标识码
2 $
文章编号:
$%"" & ’(()*!%$-+ 0,& ""01&"-
机架
大臂
.
大臂
"
未端执行器
.
轴
!
轴
.
轴
"
腕
.
腕
"
未端执行器
"
电机定子
滑块
电机
"
电机
.
电机
!
电机
-
丝杠
▲
图
"
机械手结构示意图
8
下载后可阅读完整内容,剩余3页未读,立即下载
2019-09-25 上传
2024-11-10 上传
2024-11-10 上传
2024-03-12 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情

xy5782982
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 竞速
- hamdown:[WIP]面向Haml和Markdown粉丝的下一代模板语言
- 参考资料-客户尽职调查在金融服务创新形势下的挑战与对策.zip
- galaxyjs.github.io:GalaxyJS的官方文档网站
- Disable numbers-crx插件
- cesarevalo22:PsicoAsistenteWeb接口React
- 弹簧质量阻尼器:弹簧质量阻尼器模型的PID控制-matlab开发
- 计算器
- Dobrabet-crx插件
- 第一个实验室Ruby学习cli-nitrous-q-000
- MERN-Template:感谢Dakota Rennemann和佛罗里达大学开源俱乐部。 创建的模板存储库将使用Heroku部署启动MERN堆栈项目。 因此,它是针对此用例的,如果您发现此模板但不属于该组,请在以下位置使用原始存储库
- SimpleApp
- 3x3Determinant App:可视化如何取 3x3 矩阵的行列式-matlab开发
- Widget 101: Últimas publicaciones-crx插件
- 插值超级功率q-000
- Breadfit_test
