单片机控制的智能循迹小车设计与实现
需积分: 10 23 浏览量
更新于2024-07-31
收藏 603KB DOC 举报
"基于单片机的智能小车设计,涉及单片机技术,包括小车的自动行驶、转向等功能的实现。论文包含了程序代码,详细介绍了从设计论证到硬件实施,再到软件开发的全过程。"
这篇论文详细阐述了一款基于单片机的智能小车设计,旨在实现自动循迹行驶、前进、后退和转弯等功能。首先,在方案设计与论证阶段,作者讨论了数据采集方案、显示装置和电源供电的选择。
1.1 数据采集方案选择:论文对比了三种方法——红外反射式光电检测、摄像头和激光。最终,由于反射式光电检测器的体积小、灵敏度高、线性好、外围电路简单以及价格优势,被选为近距离传感器的最佳方案。
1.2 显示装置选择:尽管LED数码管成本较低,但由于其对单片机I/O口的需求大,且不便于大量显示,所以选择了LCD液晶显示。LCD不仅可以满足更多位数的显示需求,还能减少对单片机的访问,提高电机速度控制和道路识别的精度。
1.3 电源供电设计:为适应小车的功率需求和减小重量,采用了6节5号电池(9V)供电电机,同时通过稳压器将电压降至5V供单片机使用。然而,这种设计可能导致电压不稳定和干扰,需要采取措施进行优化。
在系统硬件的具体设计与实现部分,论文涵盖了以下几个关键模块:
2.1 系统总体设计:这部分概述了整个系统的架构和功能分配。
2.2 单元模块设计:
- 稳压模块:确保单片机接收到稳定的电源。
- 电机驱动模块:控制小车的前进、后退和转向。
- LCD液晶显示:用于显示小车状态和数据。
- 道路识别单元:使用反射式光电检测器来识别路径。
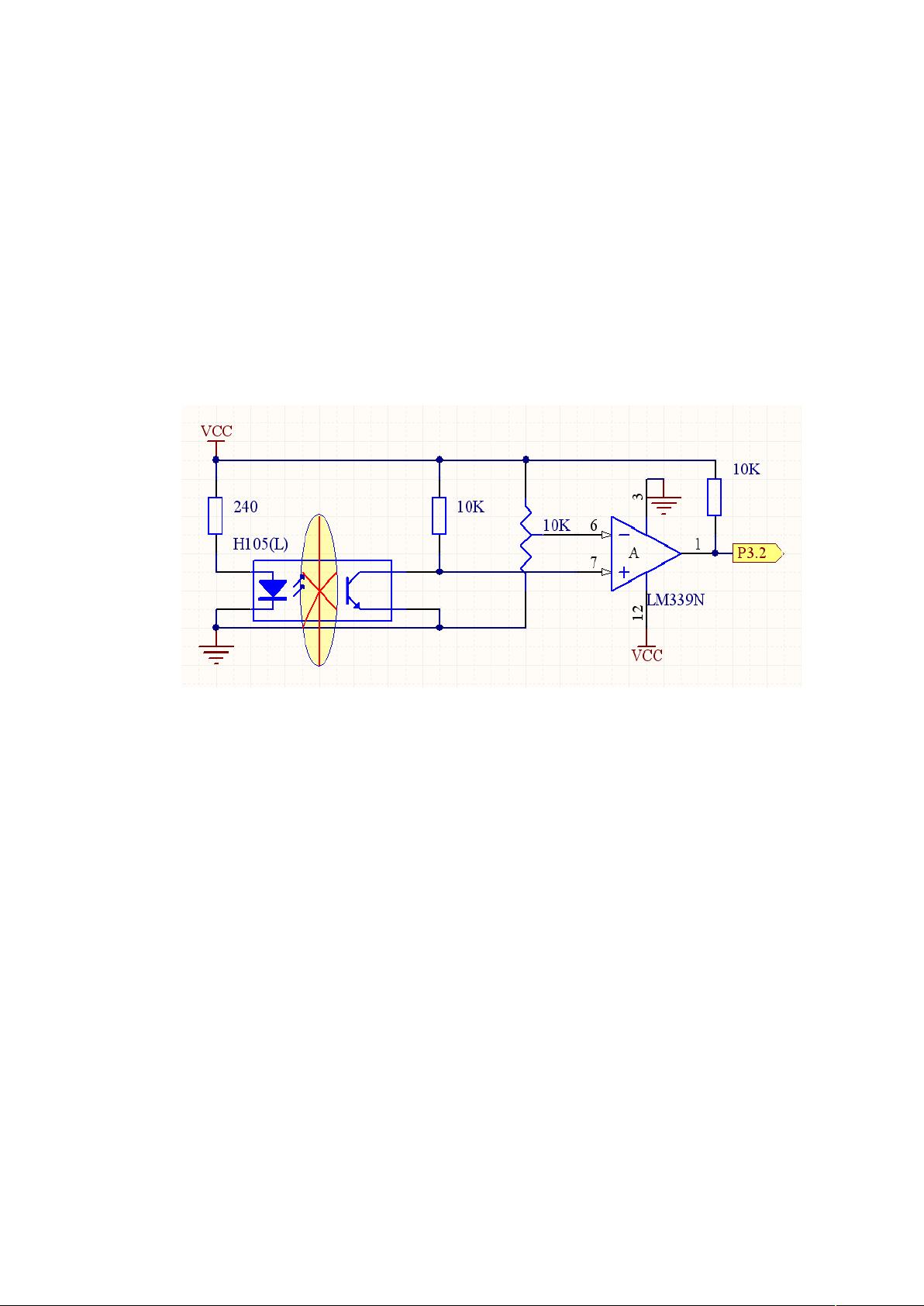
- 速度测量模块:通过槽型光耦进行速度测量。
3. 系统软件设计:这部分详述了软件开发的整体思路和具体模块,如中断处理、定时器/计数器的使用、参数计算和轨迹再现。
4. 调试过程中的问题及解决方案:针对在测试过程中遇到的问题,提供了对应的解决策略。
5. 误差分析:对速度测量和路程显示的误差进行了探讨。
6. 功能简介及应用扩展改进:介绍了小车的基本功能,并提出了可能的升级和优化方向。
7. 结束语:对整个项目进行了总结,并可能展望了未来的研究方向。
附录中包含器件清单、电路原理图、单片机内部单元地址用途说明、MATLAB程序和汇编程序等详细资料,为读者提供了进一步理解和复制该设计的必要信息。这个设计方案提供了一个实用的平台,对于学习和研究单片机控制的智能小车设计具有很高的参考价值。
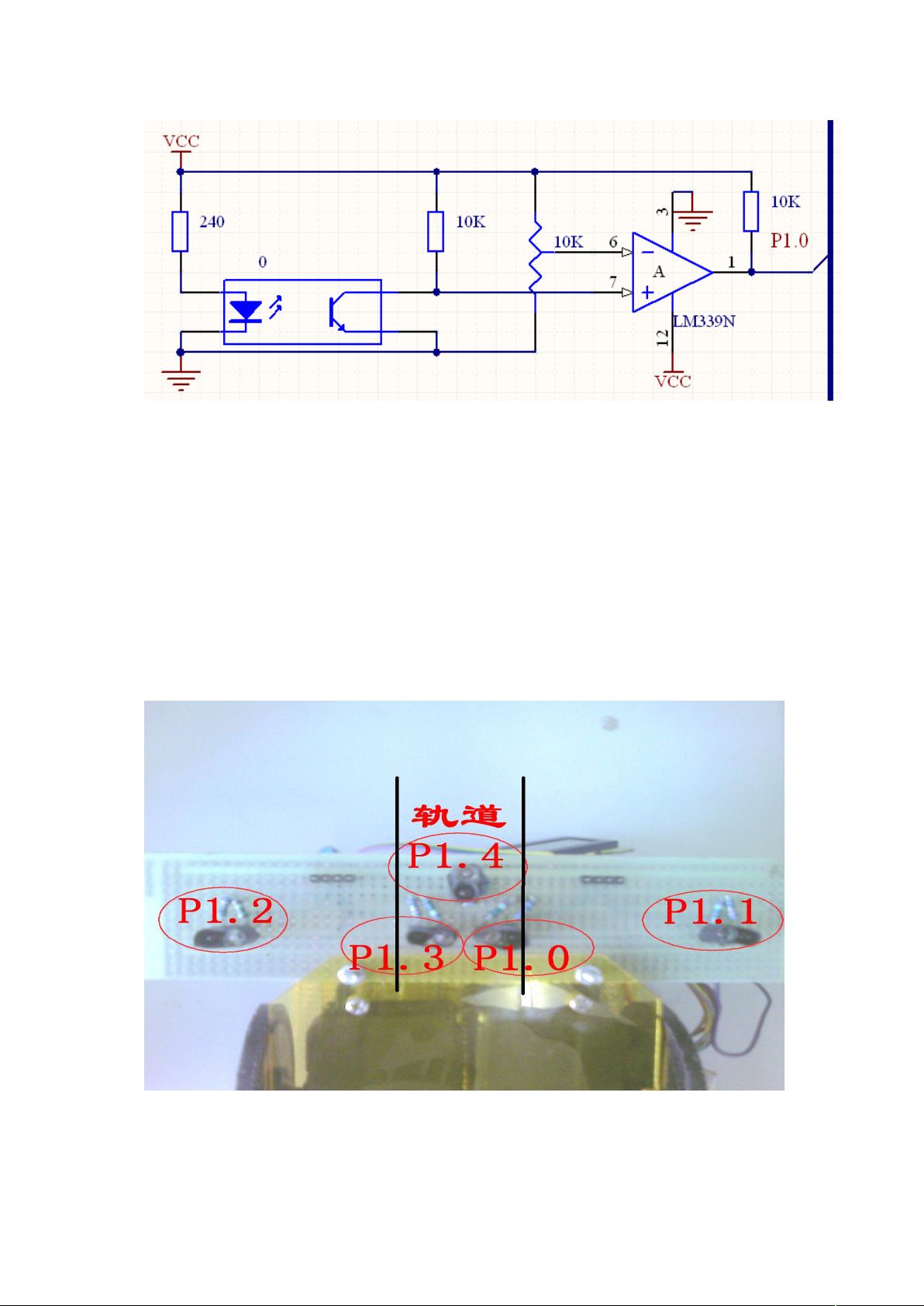
图7
传感器的安装
传感器的正确安装是小车寻迹的关键,同时也体现了设计的创新性。经过我们
的精心安排,同时考虑到使用最少的传感器而达到最好的效果,使用了5对传感
器来检测复杂的道路。此外,对管放在轨道内还是轨道外也具有不同的效果,为
了使精度高一些我们将对管放在轨道内,这样,小车一出轨道就能立刻判断出来
并且减少了干扰信号。为说明简便、并与I/O口对应起来,我们将这5对传感器命
名为0号、1号、2号、3号、4号。其中0号、3号、4号安装在黑色轨道内,使之呈
三角形,1号、2号在两侧。4号灯负责判断小车是否进入了应该转弯的位置,如
果进入转弯位置,可检查0号、3号灯进而确定转向;0号、3号的另一个作用是判
断小车是否走偏,并及时调整;2号灯判断小车是否到达终点;1号灯判断小车寻
迹的具体形状。具体实物的安装如下:
图8
5
剩余30页未读,继续阅读
151 浏览量
点击了解资源详情
点击了解资源详情
135 浏览量
2023-06-24 上传
2010-04-11 上传

wangyan19861027
- 粉丝: 19
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Pusher_Backend
- Mini-proyectos:资料库3
- 基于po模式编写的自动化测试(pytest)
- (15.2.2)--网络爬虫进阶项目实战.zip
- 行业文档-设计装置-顶升移动工作平台.zip
- 正交报告
- books_list:书单作业
- 鱼跃CMS-轻量开源企业CMS v1.0.4
- WINDOWS11强制停止WindowsUpdate服务
- matlab2017b的gui转exe.zip
- 回形针-用于类型安全的编译时检查HTTP API的OpenAPI工具库-Rust开发
- nSchedule:学习TBSchedule
- dfti2
- 千博HTML5自适应企业网站系统 v2019 Build0424
- 行业文档-设计装置-一种平台式网版印刷机的自动出料装置.zip
- jdk1.8 下载。 hotspot (包含源码)
