基于S7-200PLC的运输包装生产线组态监控(仿真)系统设计
44 浏览量
更新于2023-12-30
收藏 2.24MB DOC 举报
本文是关于基于S7-200PLC的运输包装生产线组态监控(仿真)系统设计的毕业论文。本文介绍了利用可编程控制器PLC对传送带和机械手进行控制,实现自动和手动操作模式的切换。整个系统采用了结构化的设计方法,具有调试方便和维护简单等优点。机械手作为一种新型装置,在机械化和自动化生产过程中发挥着重要作用,可以在空间内抓取、放置和搬运物体。
本文首先介绍了研究背景和意义,指出了传统生产线存在的问题和改进的需求。随着工业自动化的发展,传统的生产线已经无法满足生产效率和质量的要求,因此需要开发一种新的监控系统来解决这些问题。基于S7-200PLC的运输包装生产线组态监控(仿真)系统设计就是应对这一需求而提出的解决方案。
然后,本文对PLC控制系统的原理和结构进行了详细的介绍。PLC是一种可编程的电子设备,具有高可靠性、灵活性和可扩展性等特点,因此在工业控制领域得到了广泛的应用。本文选择了S7-200PLC作为控制系统的核心,详细介绍了它的硬件和软件组成,以及与其他设备的通信方式。
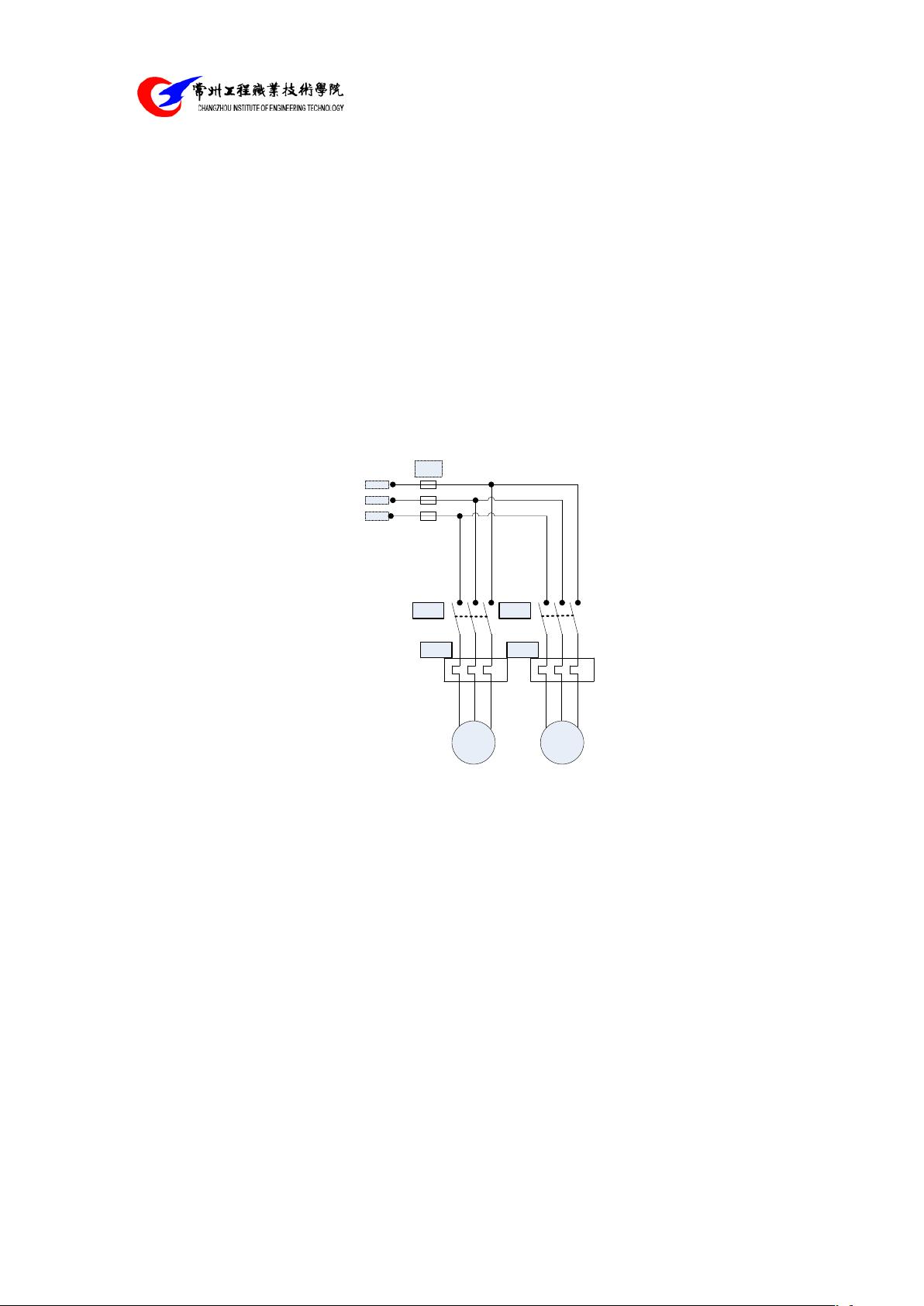
接着,本文对传送带和机械手的控制方法进行了研究和设计。传送带是将物体从一个地方运输到另一个地方的重要设备,本文采用了PLC控制传送带的速度和方向,实现物体的运输。机械手作为一种自动化装置,可以在空间内进行物体的抓取、放置和搬运等动作。本文设计了机械手的运动轨迹和动作序列,并利用PLC控制机械手的运动。
随后,本文对整个系统的仿真进行了设计和实现。通过使用仿真软件,可以模拟真实的生产环境,测试和验证系统的性能和稳定性。本文利用仿真软件对运输包装生产线组态监控系统进行了仿真,并对系统的运行状态进行了分析和评估。
最后,本文对系统设计和实现的结果进行了总结和讨论。通过对仿真结果的分析,证明了本文提出的基于S7-200PLC的运输包装生产线组态监控(仿真)系统设计的有效性和可行性。同时,本文也指出了系统存在的不足和需要进一步完善的地方。未来的工作可以在系统的功能扩展、性能优化和实际应用等方面展开。
总之,本文提出了一种基于S7-200PLC的运输包装生产线组态监控(仿真)系统设计方案,并通过仿真实现了系统的设计和验证。本文对系统的控制方法、仿真实现和结果进行了详细的介绍和分析,展示了系统的优点和潜力。这一研究对于提高运输包装生产线的自动化水平,提升生产效率和质量具有重要的理论和应用价值。同时,本文也为进一步完善和优化系统的设计提供了一定的参考和指导。
2012 届毕业设计(论文)
3
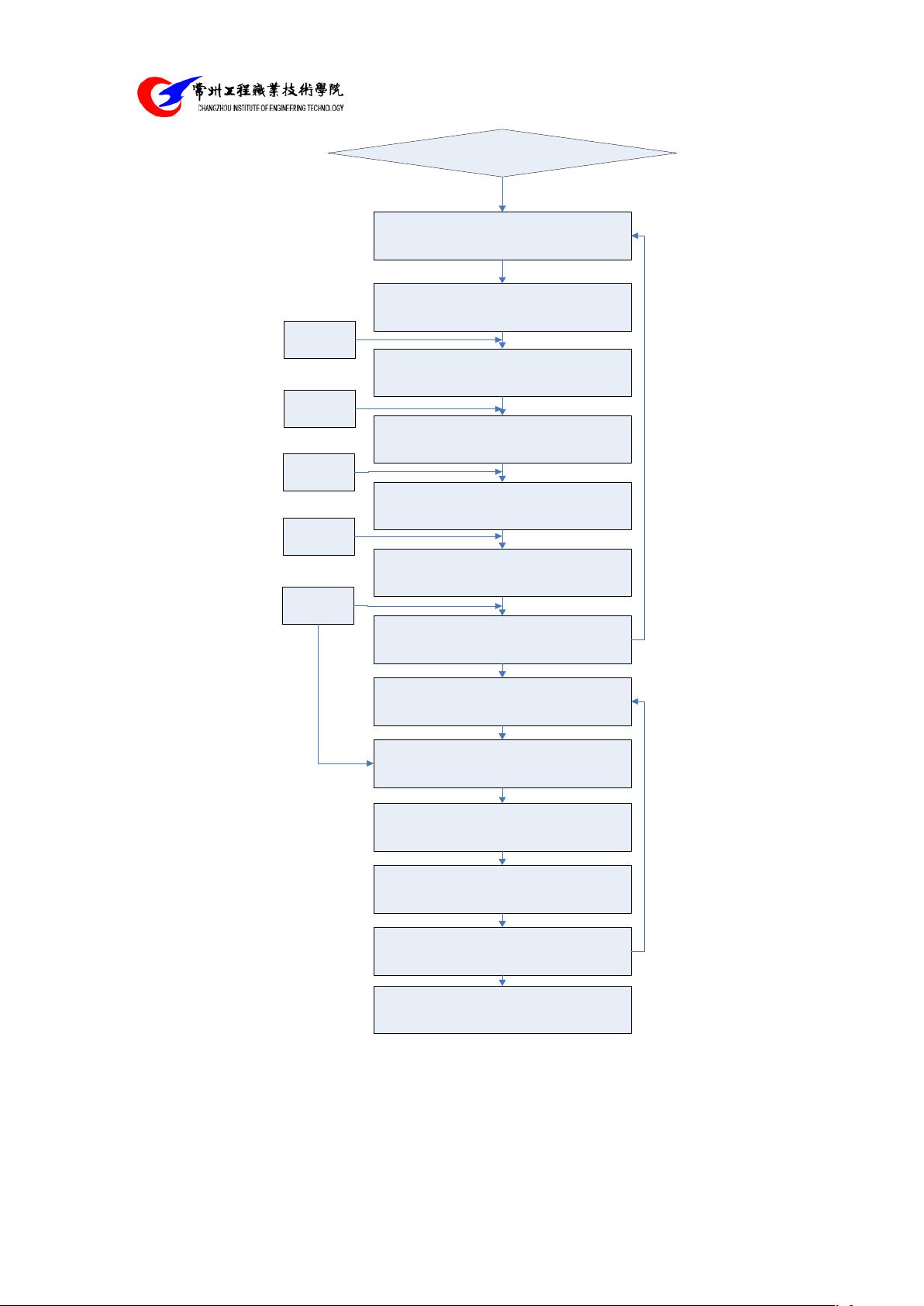
图 1.2.1
准备
传送带2运行
传送带1运行
至指定位置传送带1停止
传送带2运行
机械手上升
传送带2停止
传送带2停止
机械手右旋下降
开始
行程开关
延时1秒
计数器计
数10个
延时3秒
光电传感
机械手松开上升左旋
下降
机械手抓取货物
机械手松开
结束
剩余38页未读,继续阅读
2023-06-30 上传
165 浏览量
点击了解资源详情
196 浏览量
2023-07-11 上传
2023-06-28 上传

xinkai1688
- 粉丝: 389
- 资源: 8万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- makoto-kokubo.github.io
- VideoPlayer2.0.zip
- 51单片机8位数码管显示
- ChileAirQualityProject:智利清洁航空网creada midte R que entrega herramientas para valuaryy and analizar la calidad del aire en
- myportfolio_backend:MERNStack中的一个社交网络项目
- 现代白色时尚客厅3D模型
- react-form-validation
- SearchInZipFiles:搜索包含在 zip 文件中的文件中的文本-开源
- 班前班后会议记录excel模版下载
- Capstone-APM-Tool
- java 订餐 Swing mysql
- medaront
- 使用 Matlab 进行 UR5 控制:读取当前机器人工具提示,移动到所需的姿势和方向-matlab开发
- 自动计算会计凭证excel模版下载
- cyglua-exp:lua.experiment
- PUG-Guild
