扩展的旋转Haar特征:快速目标检测的新进展
需积分: 10 60 浏览量
更新于2024-09-10
2
收藏 160KB PDF 举报
"文章介绍了扩展的Haar特征在快速物体检测中的应用,通过引入旋转的Haar-like特征和改进的后优化程序,显著提高了检测的准确性和效率。"
Haar特征是一种在计算机视觉领域广泛用于人脸和其他物体检测的技术,最早由Paul Viola和Michael Jones在其2001年的论文中提出。这些特征源于图像处理的基础概念,主要用于解决实时目标检测问题,如人脸识别。Haar特征以简单的矩形结构为基础,可以捕捉图像中亮度的变化,从而帮助识别特定的形状和模式。
传统的Haar特征包括三种基本类型:水平、垂直和对角线边缘检测。它们通过计算图像窗口内不同区域的像素和来表示特征。例如,一个简单的Haar特征可能是一个黑色背景上的白色矩形,或者相反,用于检测图像中的边缘或对比度变化。
在给定的描述中,作者介绍了一种新的、45°旋转的Haar-like特征,这显著扩大了基础特征集,使检测算法能够更准确地识别不同角度的物体。这种扩展不仅丰富了特征库,还因为计算效率高而提升了整体性能。通过使用这些旋转特征,检测器在保持相同检测率的同时,平均降低了10%的误报率。
此外,文中还提出了一种新颖的后优化流程,针对已训练好的级联分类器进行改进,进一步平均降低了12.5%的误报率。这意味着在保持高检测率的同时,误识别其他非目标物体的情况大大减少。当在CMU人脸数据集上测试时,结合这两种增强技术,可以在82.3%的检测率下将误检数量降低到只有24个。
Viola和Jones的多阶段分类方法是Haar特征检测的核心,它通过一系列弱分类器的级联构成强分类器,每一阶段都尽可能地过滤掉非目标对象,从而减少了后续阶段的计算负担。这种方法极大地缩短了处理时间,同时保持了与复杂单阶段分类器相当的准确性。
总结来说,Haar特征及其扩展(如旋转特征)是计算机视觉中高效的目标检测工具,尤其适用于实时应用。通过不断的特征扩展和算法优化,可以显著提高检测的精度和速度,降低误报率,这对于人脸识别、车辆检测等应用具有重要意义。
ABSTRACT
Recently Viola et al. [5] have introduced a rapid object detection
scheme based on a boosted cascade of simple features. In this paper
we introduce a novel set of rotated haar-like features, which
significantly enrich this basic set of simple haar-like features and
which can also be calculated very efficiently. At a given hit rate our
sample face detector shows off on average a 10% lower false alarm
rate by means of using these additional rotated features. We also
present a novel post optimization procedure for a given boosted
cascade improving on average the false alarm rate further by 12.5%.
Using both enhancements the number of false detections is only 24
at a hit rate of 82.3% on the CMU face set [7].
1 Introduction
Recently Viola et al. have proposed a multi-stage classification
procedure that reduces the processing time substantially while
achieving almost the same accuracy as compared to a much slower
and more complex single stage classifier [5]. This paper extends
their rapid object detection framework in two important ways:
Firstly, their basic and over-complete set of haar-like feature is
extended by an efficient set of 45° rotated features, which add
additional domain-knowledge to the learning framework and which
is otherwise hard to learn. These novel features can be computed
rapidly at all scales in constant time. Secondly, we derive a new post-
optimization procedure for a given boosted classifier that improves
its performance significantly.
2 Feature Pool
The main purpose of using features instead of raw pixel values as the
input to a learning algorithm is to reduce the in-class while
increasing the out-of-class variability compared to the raw data and
thus making classification easier. Features usually encode
knowledge about the domain, which is difficult to learn from the raw
and finite set of input data. A very large and general pool of simple
haar-like features combined with feature selection therefore can
increase the capacity of the learning algorithm.
The speed of feature evaluation is also a very important aspect since
almost all object detection algorithms slide a fixed-size window at
all scales over the input image. As we will see, our features can be
computed at any position and any scale in the same constant time.
Only 8 table lookups are needed.
2.1 Feature Family
Our feature pool was inspired by the over-complete haar-like
features used by Papageorgiou et al. in [4,3] and their very fast
computation scheme proposed by Viola et al. in [5], and is a
generalization of their work.
Let us assume that the basic unit for testing for the presence of an
object is a window of pixels. Also assume that we have a very
fast way of computing the sum of pixels of any upright and 45°
rotated rectangle inside the window. A rectangle is specified by the
tuple with , , ,
, and and its pixel sum is denoted by
. Two examples of such rectangles are given in Figure 1.
Our raw feature set is then the set of all possible features of the form
,
where the weights , the rectangles , and N are arbitrarily
chosen.
This raw feature set is (almost) infinitely large. For practical reasons,
it is reduced as follows:
1. Only weighted combinations of pixel sums of two rectangles are
considered (i.e., ).
2. The weights have opposite signs, and are used to compensate for
the difference in area size between the two rectangles. Thus, for
non-overlapping rectangles we have
. Without restrictions we can set
and get .
3. The features mimic haar-like features and early features of the
human visual pathway such as center surround and directional
responses.
These restrictions lead us to the 14 feature prototypes shown in
Figure 2:
• Four edge features,
• Eight line features, and
• Two center-surround features.
These prototypes are scaled independently in vertical and horizontal
direction in order to generate a rich, over complete set of features.
Note that the line features can be calculated by two rectangles only.
Hereto it is assumed that the first rectangle encompasses the
black and white rectangle and the second rectangle represents the
black area. For instance, line feature (2a) with total height of 2 and
width of 6 at the top left corner (5,3) can be written as
.
Only features (1a), (1b), (2a), (2c) and (4a) of Figure 2 have been
used by [3,4,5]. In our experiments the additional features
significantly enhanced the expressional power of the learning
system and consequently improved the performance of the object
detection system. Feature (4a) was not used since it is well
approximated by feature (2g) and (2e).
N
UMBER OF FEATURES. The number of features derived from each
prototype is quite large and differs from prototype to prototype and
WH×
r xywhα,, ,,()=0xx w W≤+,≤
0 yy h H≤+,≤
xy 0≥,
wh 0>,α0° 45°,{}∈
RecSum r()
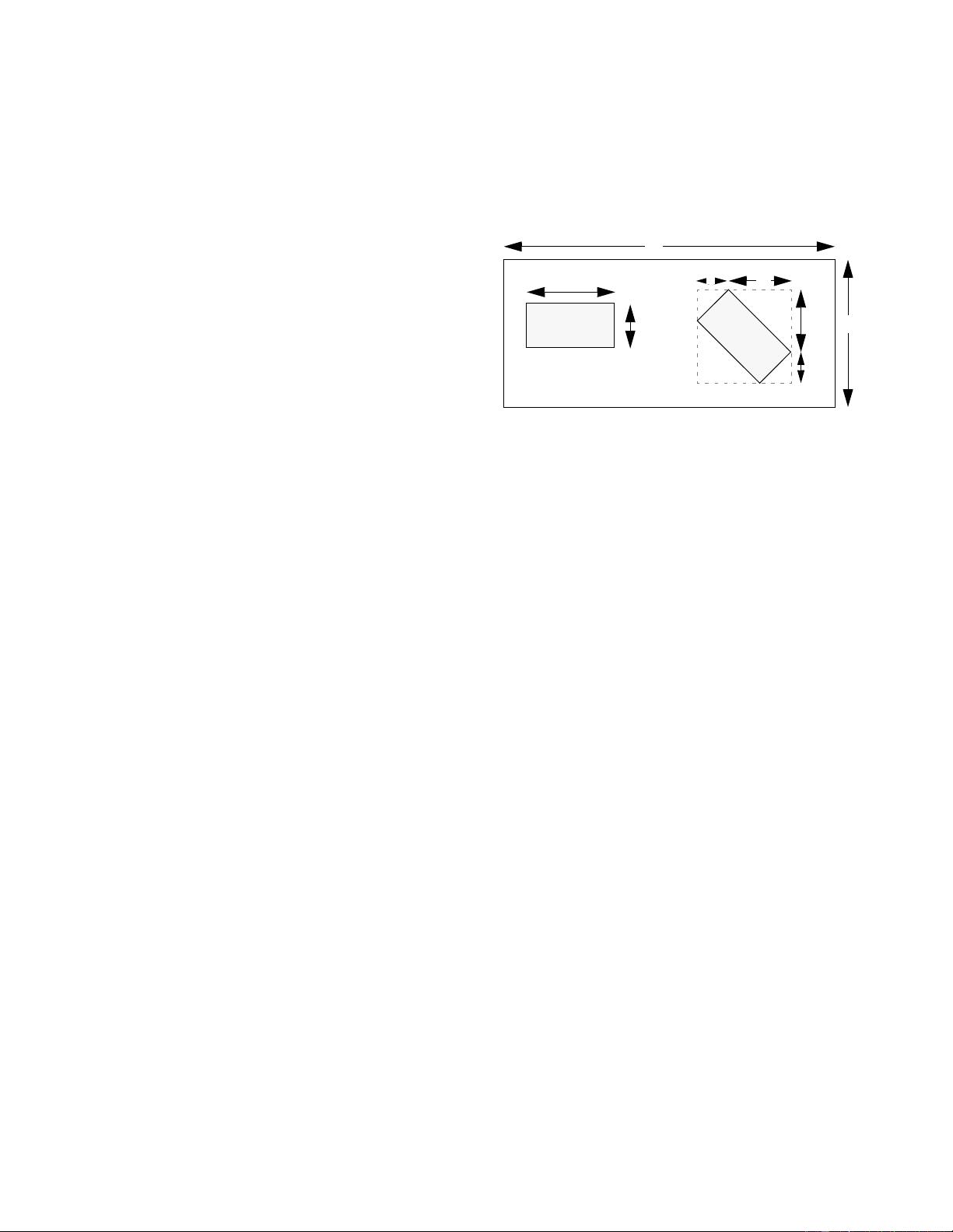
Figure 1. Examples of an upright and 45° rotated rectangle.
upright rectangle
45 rotated rectangle
Window
w
h
w
h
W
H
h
w
feature
I
ω
i
RecSum r
i
()⋅
iI∈ 1 … N,,{}=
∑
=
ω
i
ℜ∈ r
i
N 2=
w
0
– Area r
0
()⋅ w
1
Area r
1
()⋅=
w
0
1–= w
1
Area r
0
()Area r
1
()⁄=
r
0
r
1
feature
I
1– R⋅ ecSum 53620°,,,,()3 R⋅ ecSum 73220°,,,,()+=
An Extended Set of Haar-like Features for Rapid Object Detection
Rainer Lienhart and Jochen Maydt
Intel Labs, Intel Corporation, Santa Clara, CA 95052, USA
Rainer.Lienhart@intel.com
下载后可阅读完整内容,剩余3页未读,立即下载
2018-04-26 上传
2022-09-24 上传
2010-12-29 上传
2010-04-05 上传
2009-03-27 上传
181 浏览量
2022-06-06 上传
2018-06-12 上传
2014-12-12 上传

vegetablebird_yang
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- Raspberry Pi OpenCL驱动程序安装与QEMU仿真指南
- Apache RocketMQ Go客户端:全面支持与消息处理功能
- WStage平台:无线传感器网络阶段数据交互技术
- 基于Java SpringBoot和微信小程序的ssm智能仓储系统开发
- CorrectMe项目:自动更正与建议API的开发与应用
- IdeaBiz请求处理程序JAVA:自动化API调用与令牌管理
- 墨西哥面包店研讨会:介绍关键业绩指标(KPI)与评估标准
- 2014年Android音乐播放器源码学习分享
- CleverRecyclerView扩展库:滑动效果与特性增强
- 利用Python和SURF特征识别斑点猫图像
- Wurpr开源PHP MySQL包装器:安全易用且高效
- Scratch少儿编程:Kanon妹系闹钟音效素材包
- 食品分享社交应用的开发教程与功能介绍
- Cookies by lfj.io: 浏览数据智能管理与同步工具
- 掌握SSH框架与SpringMVC Hibernate集成教程
- C语言实现FFT算法及互相关性能优化指南
