红外成像与毫米波雷达传感器目标跟踪融合技术分析
9 浏览量
更新于2024-08-26
收藏 338KB PDF 举报
"这篇研究论文探讨了红外成像和毫米波雷达传感器在目标跟踪中的应用,分析了基于卡尔曼滤波的多传感器数据融合的两种常用方法:加权交叉协方差融合和扩展测量融合。通过模拟实验展示了这两种融合方法在特定条件下的等效性,并证明联合状态向量估计优于单个传感器的独立估计。"
本文主要关注的是目标跟踪技术,特别是利用红外成像和毫米波雷达传感器进行联合跟踪。红外成像技术擅长在低光照环境下捕捉热信号,而毫米波雷达则能在穿透烟雾、雨雪等环境干扰的情况下提供目标信息,两者结合可以提高目标检测和跟踪的准确性和鲁棒性。
首先,论文介绍了基于卡尔曼滤波的多传感器数据融合技术。卡尔曼滤波是一种广泛应用的估计理论,用于在存在噪声的情况下对动态系统进行最优估计。对于多传感器系统,数据融合是整合来自不同传感器的信息以获得更精确的估计的关键步骤。文中比较了两种融合策略:
1. 加权交叉协方差融合:这种方法通过分配不同权重来综合各个传感器的观测值,以减少不确定性并优化估计结果。
2. 扩展测量融合:这种方法通过直接将所有传感器的测量值合并到一个更大的测量向量中,扩展了系统的状态空间,从而实现融合。
通过对两种融合方法的分析,研究发现,当用于融合的传感器具有相同的测量矩阵时,这两种方法在功能上是等效的。这意味着在特定条件下,无论选择哪种融合策略,都能得到相似的跟踪效果。
此外,通过蒙特卡洛模拟,论文展示了两种虚拟轨迹的结果,这些结果表明,与单个传感器的独立估计相比,融合后的联合状态向量估计更优。这表明,尽管两种融合方法在某些情况下可能等效,但它们都能提升整体跟踪性能,特别是在传感器特性互补的情况下。
该研究论文对红外成像和毫米波雷达传感器的融合目标跟踪进行了深入探讨,为实际应用中的目标检测和跟踪提供了有价值的理论支持和实践指导。通过优化数据融合策略,可以进一步提高复杂环境下的目标识别和跟踪能力。
TARGET TRACKING WITH INFRARED IMAGING AND
MILLIMETRE-WAVE RADAR SENSOR
ZHANG Xuejing
1
ˈ
2
,MA Long
1
,CHEN He
1,
*, YANG Jing
2
(1. Departmen
t
of Electronic Engineering, School of Information
and Electron, Beijing Institute of Technology, Beijing 100081,
China; 2. Department of Electronics Engineering
School of Information, Beijing Union University
Beijing, 100101
)
Corresponding author(email:chenhe@bit.edu.cn)
Abstract
Two commonly used tracking fusion methods for Kalman-
filter-based multi-sensor data fusion which are weighed cross-
covariance fusion and augmented measurement fusion are
analysed in this paper. Based on tracking fusion of infrared
sensor and millimetre wave Radar ,the fused states and
measurements are compared with individual estimates.
Results are presented using Monte Carlo simulation by two
given virtual trajectories which show that: (1)the two fusion
methods are functionally equivalent if the sensors used for
data fusion have identical measurement matrix;(2)the
obtained joint state-vector estimate is better than the
individual sensor-based estimate. Also presented are the
possible reason caused the bias between individual position
estimate and true followed by the analysis of the
computational advantages of each method.
Keywords: Extended-Kalman filter; infrared Image;
millimetre wave Radar ˗ Weighed cross-covariance fusion;
Extended measurement
1 Introduction
With the rapid development of sensor technology, a variety
of multi-sensor system[1-7] aiming at different complex
applications background spring up at an increasing rate.
Because the battlefield surroundings are becoming more and
more complicated, the seeker with only one guiding sensor
can easily be cheated and interfered. In other words, it can
hardly meet the demand of precision target recognizing and
tracking. Therefore multiple sensors are widely used to
enhance target-tracking capabilities[8,9]. Radar can measure
range with good resolution, but angular measurements have
poor resolution. An infrared search-and-track sensor (IR) can
measure the azimuth and elevation of a target with good
resolution. It can provide only the direction of a target but not
its location because it does not provide the range. The fusion
of measurements from radar and IR results in less uncertainty
of the estimated position of the target.
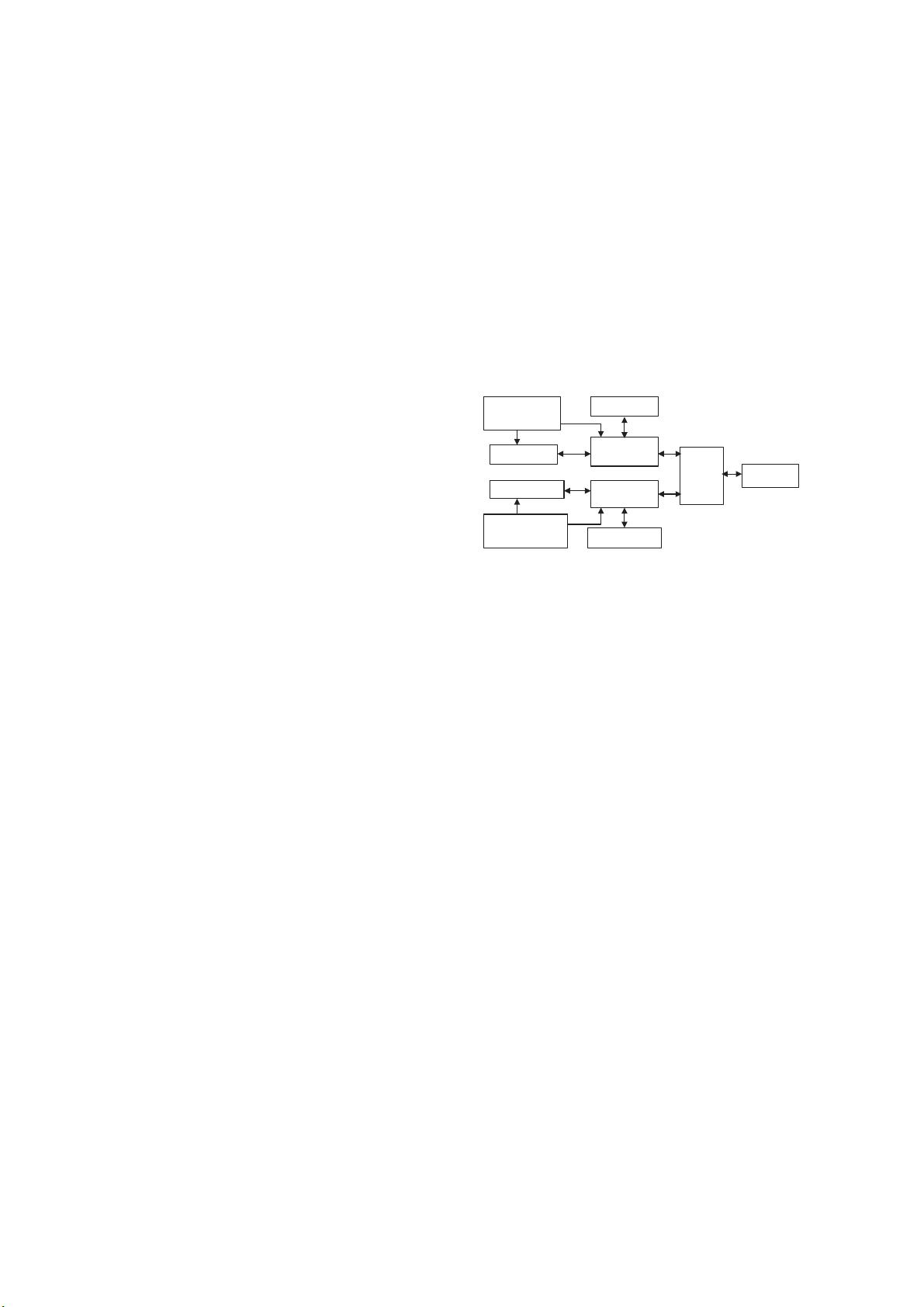
Figure.1 A Infrared/Millimetre Wave seeker Tracking
schematic diagram
Figure 1 shows the schematic diagram of a millimetre wave
radar/ infrared composite guidance systems .Infrared sensors
and millimetre-wave radar are used to detect the tracking
target ; Two sets of servo provide servo drive for infrared and
radar sensors; The trackers are used to achieve the automatic
recognition and tracking of the target; The controllers are
used to coordinate the work of sensor, servo , tracker and
communications for information fusion ; information fusion is
responsible for the communication to Navigation , and to
coordinate the work between infrared and radar .The guided
strategy is mainly generated in the information fusion .
Two methodologies[10] have been employed for track fusion
purpose, which are state vector fusion and measurement
fusion. there are two approaches to state vector fusion, which
are :weighted cross covariance and information matrix. But
the performance of later is influenced greatly by the
feedback(particularly the fused covariance) which is not exact
and could mislead the local sensors. There are also two
measurement fusion methods for multi-sensor data fusion.
The first combine the multi-sensor data based on a minimum-
mean-square-error criterion but may be inapplicable in some
situations, such as with dissimilar sensors whose
measurement matrix are of different size[11].The second
called augmented measurement fusion merges the multi-
sensor data through the observation vector of the Kalman
filter and implement is simple. This research is restricted to
the weighted cross covariance fusion and augmented
measurement fusion.
The two fusion methods analysed in this paper are
concentrated approach and distributed approach respectively.
In the first method, the measurements from IR and radar are
combined using covariance matrix as weights; and in the
Millimeter
Wave Radar
Infrared Imaging
Sensor
Radar Servo
Radar Track
Infrared Servo
Infrared Track
Radar
Control
Infrared
Control
Data
Fusion
Navigation
下载后可阅读完整内容,剩余7页未读,立即下载
132 浏览量
190 浏览量
2023-12-27 上传
2022-11-20 上传
2021-08-29 上传
2022-12-15 上传
2021-08-08 上传
166 浏览量
2021-02-11 上传

weixin_38702515
- 粉丝: 12
- 资源: 927
 我的内容管理
展开
我的内容管理
展开







最新资源
- SQL 21 日自学通.pdf
- RHEL4上安装基于postfix的全功能邮件服务器
- (论文)模逆算法的分析、改进及测试
- SQL Server 2005两个十个最重要的特点
- Jsp开发环境配置指导,新手的好帮手!
- 关于DSP研究开发的 c编程指南
- myeclipse快捷键大全
- SUN - SL-275 Java Programming Language.pdf
- 标准c程序100例 好的算法
- 网络信息工程招标文件示例
- SL-275 认证考试中文教材.pdf
- Quartus2使用指南1.pdf
- Windows上的服务器端安装(Subversion).doc
- PHP.5.Recipes.A.Problem.Solution.Approach.Sep.2005
- XP口令大全(运行命令)
- 深入了解示波器 示波器选型
