埃斯顿ER系列大负载机器人使用手册:安全与操作指南
需积分: 9 163 浏览量
更新于2024-07-09
收藏 4.12MB PDF 举报
本资源是南京埃斯顿机器人工程有限公司发布的"ESTUN机器人ER系列控制柜(ERC控制器版本)使用说明书E-0202CN-02",主要针对通用大负载系列机器人的操作和安全使用。这份手册详细阐述了埃斯顿大负载机器人的使用方法和安全规定,旨在确保用户能够正确、安全地操作机器人。
首先,手册强调了安全使用的重要性,要求用户在开始使用前务必充分理解和遵守"安全使用须知"部分。这里涵盖了使用机器人前的准备工作,如了解所在地区的标准和法律,安装必要的安全设施,并且要求操作人员、程序人员和维修人员都要经过专门的机器人专业培训,以熟悉作业内容、操作流程和安全规定。
操作人员负责机器人的电源控制和程序启动,而程序人员和维修人员则进行更为复杂的任务,如示教、维护和修理。在操作过程中,他们都必须穿戴适当的个人防护装备,如作业服、安全鞋和安全帽,以降低潜在的风险。
手册中还特别指出,尽管提供了详尽的操作指南,埃斯顿公司并不能保证在严格按照指示执行的情况下,使用者不会受到伤害,因为使用环境和操作者的个体差异可能带来风险。因此,用户必须对其使用产品负全责,务必在完全理解并遵守所有安全规定后才进行操作。
此外,手册还包含了公司的联系方式,如产品服务热线、地址、电子邮箱等,以便用户在遇到问题时寻求帮助。版权信息也得到明确,提醒读者未经许可,不得复制和传播手册内容。
这份使用说明书不仅提供了技术细节,更突出了安全第一的原则,对于埃斯顿大负载系列机器人用户来说,是不可或缺的参考资料。
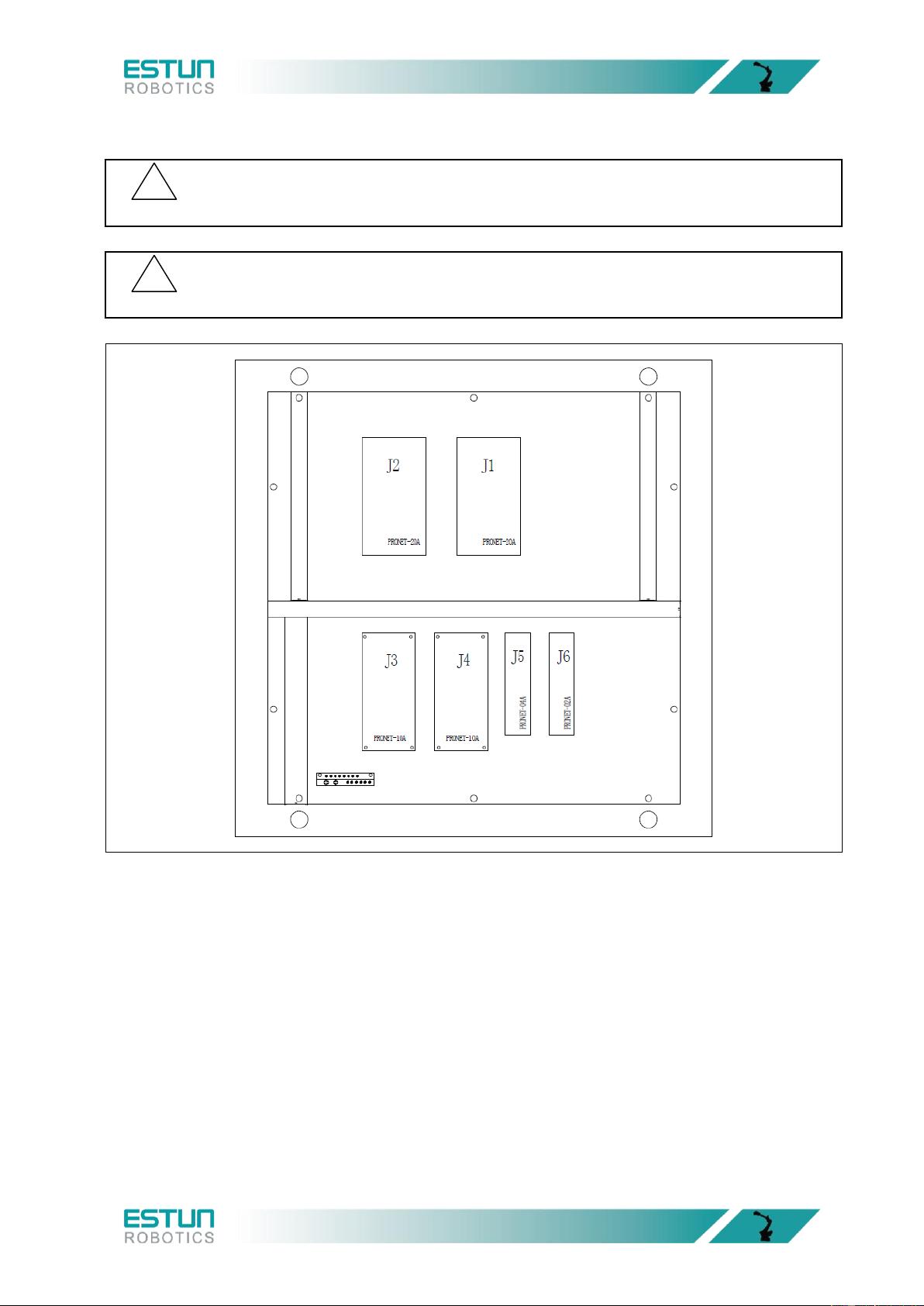
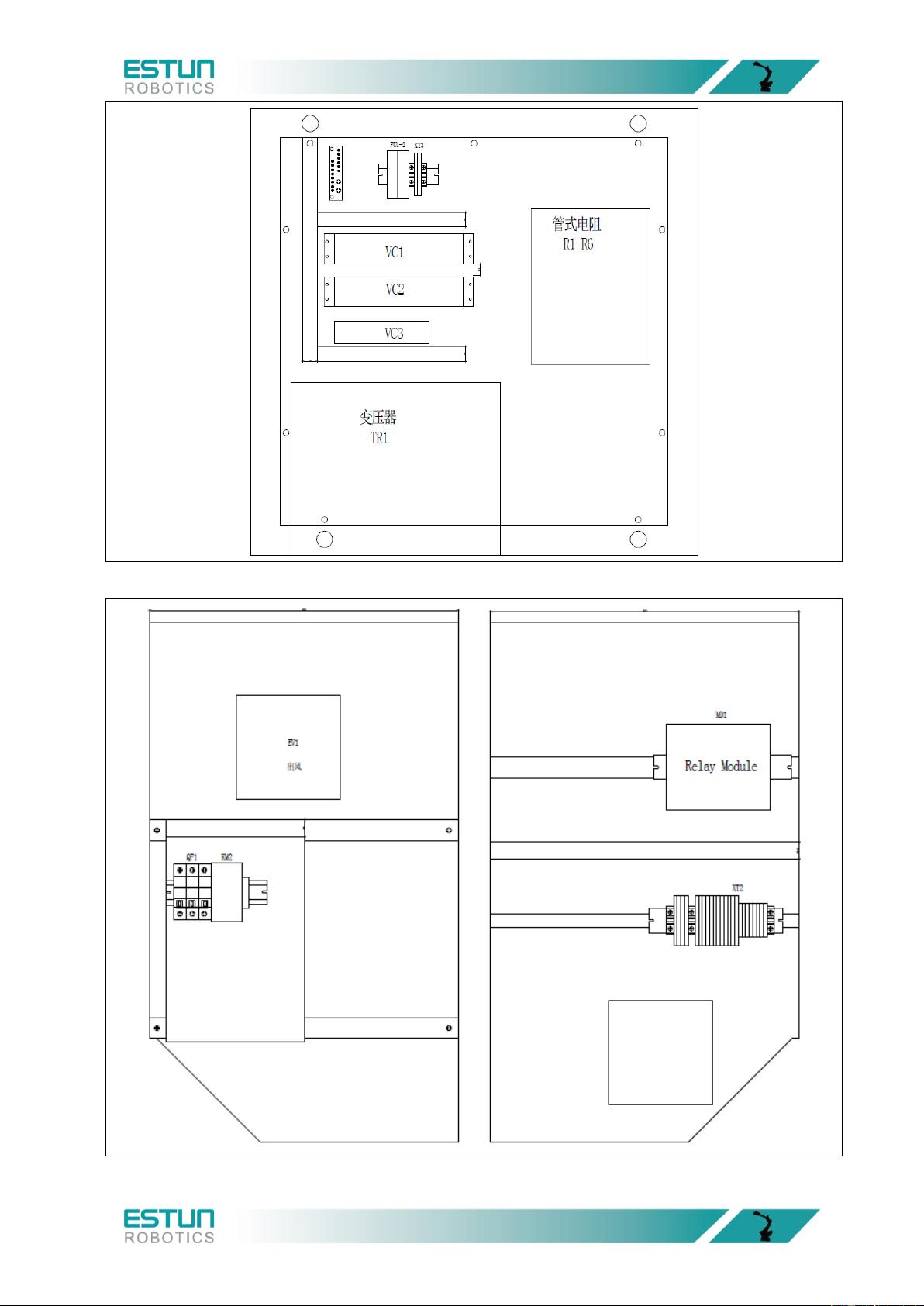
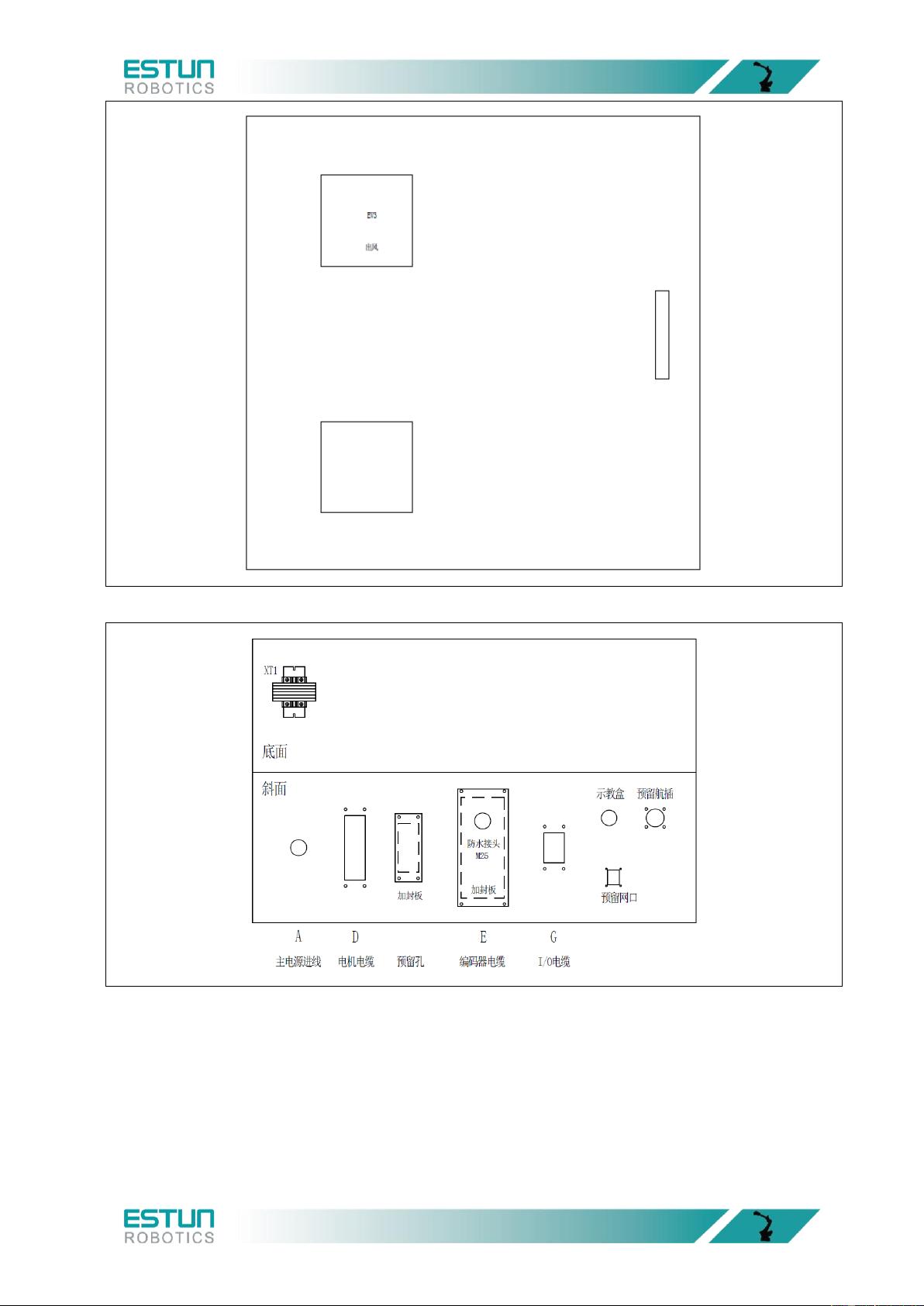
控制柜结构
3
启动
本地 远程
停止
1
2 3
4
5
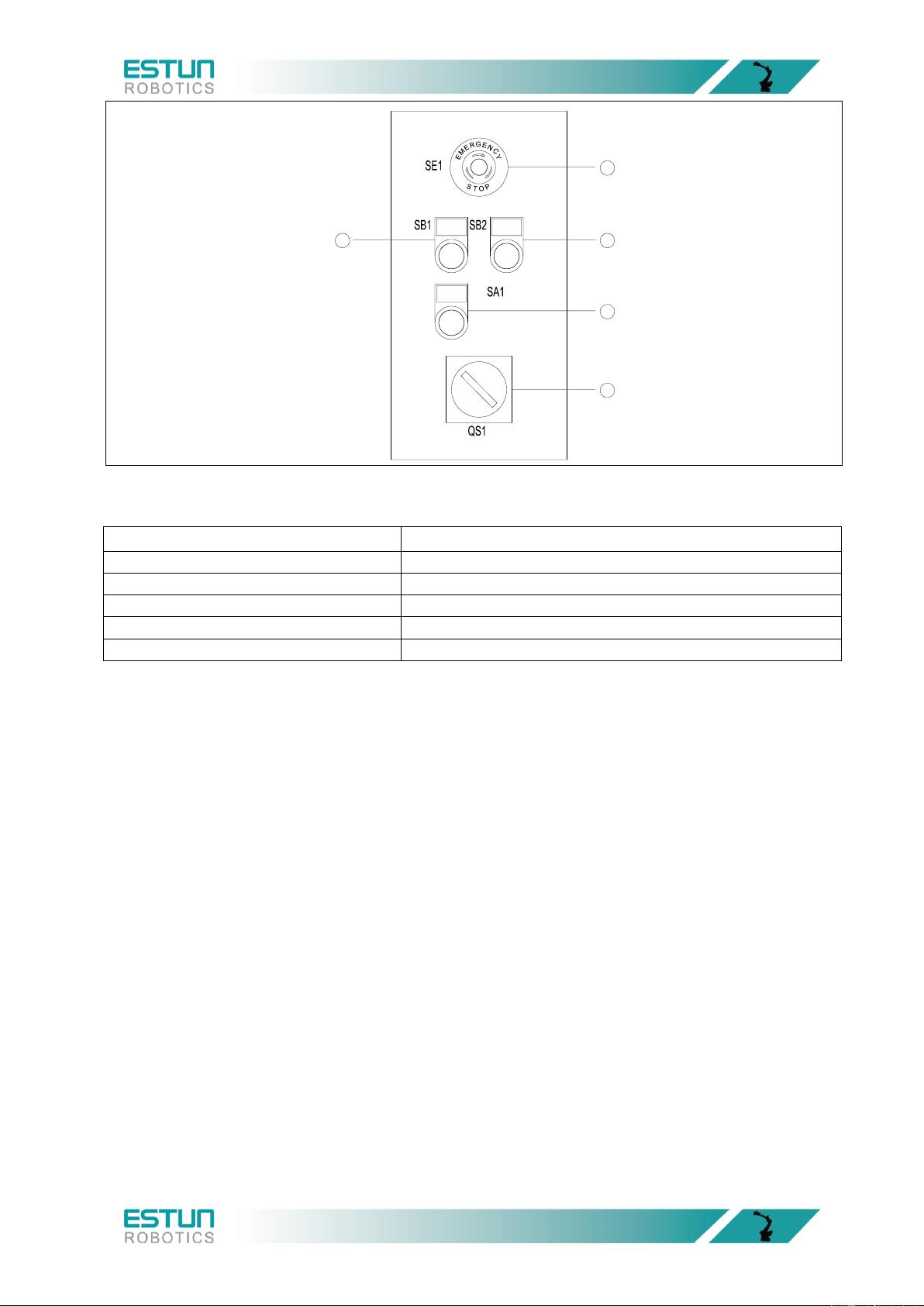
图 1.3 控制柜面板按钮示意图
表 1.3 控制柜面板各按钮作用
面板操作按钮
说明
1
紧急停止按钮
2
启动按钮及运行指示灯
3
停止按钮及报警指示灯
4
本地/远程切换开关
5
控制柜主电源开关
剩余99页未读,继续阅读
3912 浏览量
163 浏览量
112 浏览量
342 浏览量
293 浏览量
2023-02-11 上传
121 浏览量
2351 浏览量
5680 浏览量

aixiaofengdaxiong
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 设置Windows 10 1903/1909/2004的脚本-.NET开发
- 一个TCP和UPD聊天、传收文件程序
- Homework-QUestion
- MTK10.0竖屏壁纸居中补丁.zip
- xiubox
- 键盘测试工具,机械键盘换轴后检测用
- echidna:W3C的新发布工作流程-主要组件
- Vue Devtools
- SoapUI(附安装步骤).rar
- pid控制器代码matlab-CDC18a:A.Selivanov和E.Fridman,“PID控制器的鲁棒采样数据实现”,在第57届IEEE
- animeWiki
- mcjoin:简单的多播测试应用程序
- abc:aa
- Asc2Silo file converter-开源
- 行业文档-设计装置-一种拱桥施工平台结构.zip
- BE2Works_v4.52_Bohol_fu11.7z
