KUKA机器人KRL编程指南
"kuka机器人编程"
KUKA机器人编程主要涉及使用KRL(KUKA Robot Language)语言来创建和管理机器人程序,以实现自动化任务。这篇文档详细介绍了如何进行KUKA机器人的编程,包括KRC(KUKA Robot Controller)专家编程以及KUKA系统软件(KSS)的版本4.1的相关内容。
KRL程序的一般信息:
KRL程序由多个部分组成,包括程序接口、文件概念和文件结构。程序接口定义了程序与其他系统交互的方式,而文件概念则涉及到程序的组织形式。文件结构描述了程序中不同文件的布局和作用,通常包含初始化文件、任务文件、子程序和数据块等。
建立和编辑程序:
要创建一个新的KRL程序,首先要了解如何新建一个程序,并掌握建立、编译和联接的基本步骤。新建程序通常涉及定义程序名称和基本结构。编译是检查代码语法错误的过程,而联接则是将各个程序模块组合在一起,形成可执行的整体。
在编辑程序时,可能需要对已有的代码进行修改。这可以通过直接编辑代码块、复制和粘贴代码段,或者剪切和移动代码来实现。块函数允许用户操作代码块,例如定义或修改函数。拷贝(CTRL-C)、粘贴(CTRL-V)和剪切(CTRL-X)是常用的编辑快捷键,用于在代码之间移动或复制内容。
替换程序:
程序替换或更新是日常编程工作的一部分。这包括对现有程序进行修改以适应新的任务需求,或优化现有代码以提高效率。编辑功能允许用户在不破坏整体结构的情况下改动代码,确保程序的正确性和稳定性。
KUKA系统软件(KSS)版本4.1:
KSS是KUKA机器人的核心软件,它提供了与机器人控制器交互的平台。版本4.1发布于2004年1月9日,可能包含特定的功能和改进。尽管文档中没有详述所有控制部分的函数,但用户应理解,随着技术的发展,某些未描述的函数可能会在实际应用中发挥作用。
重要的是,KUKA保留了在不影响系统功能的前提下进行技术更改的权利,这意味着用户需要保持软件的更新,以获取最新的特性和修正。此外,文档中声明,对于一致性、数据和说明的准确性,KUKA不提供绝对的保证,用户需要定期查阅更新以获取最新的信息。
KUKA机器人编程涉及对KRL语言的深入理解和熟练运用,以及对KSS的理解和维护。这包括编写、编辑、测试和优化程序,以及对系统软件的管理和更新,以确保机器人系统的高效和可靠运行。
专家级编程
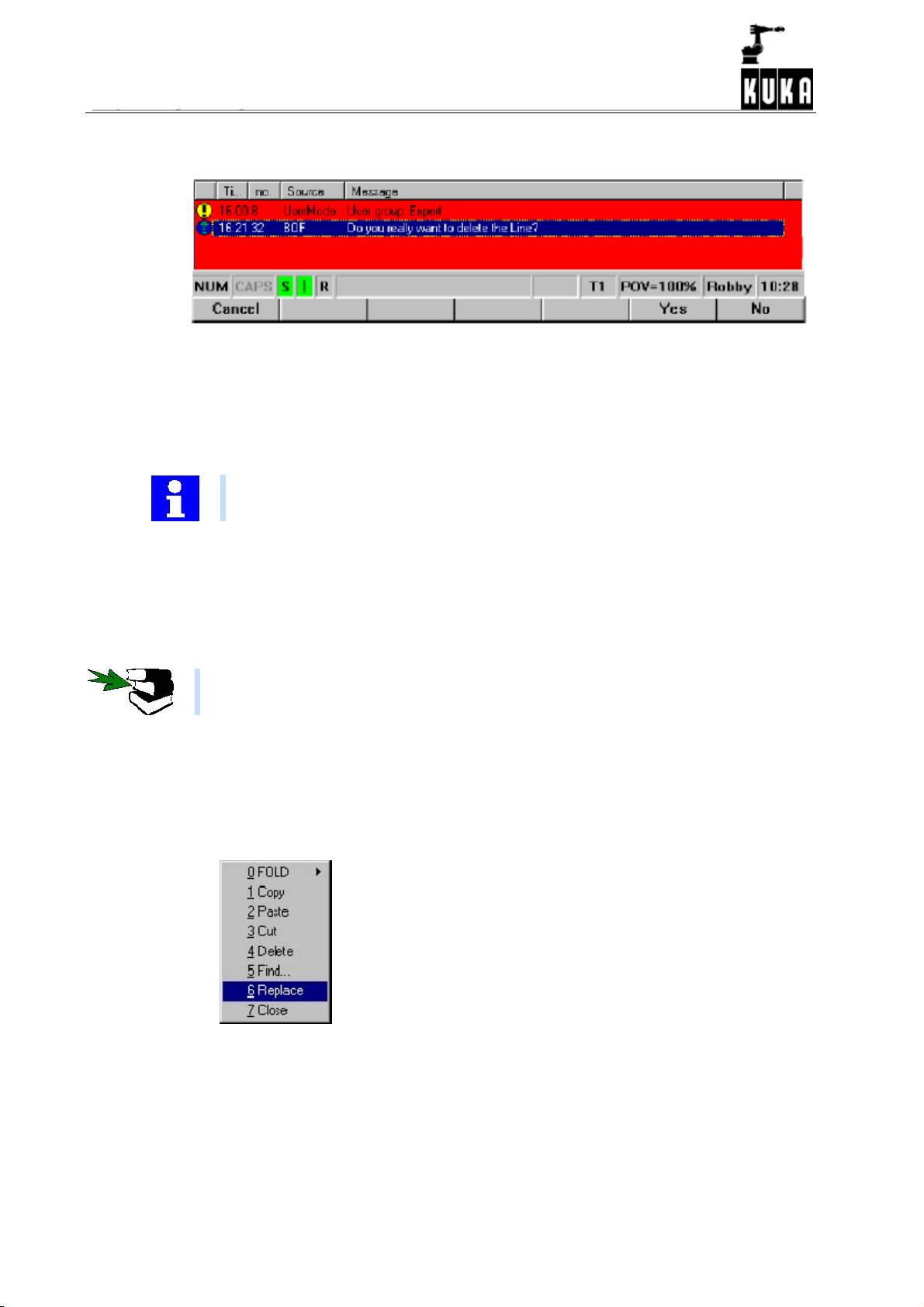
因此,一个必须通过软键栏应答的需要确认的请求将出现在消息窗口。
Cancel “删除”动作被取消:
Yes 选择的区域被永久删除:
No “删除”功能被取消。
如果从菜单中选择“删除”选项,则从程序中删除选择的程序部分且不被拷贝到剪
贴板。
1.3.2.6 搜索
更多的信息见操作手册资料的用户编程[程序编辑]一章的[使用程序编辑器工作]一节。
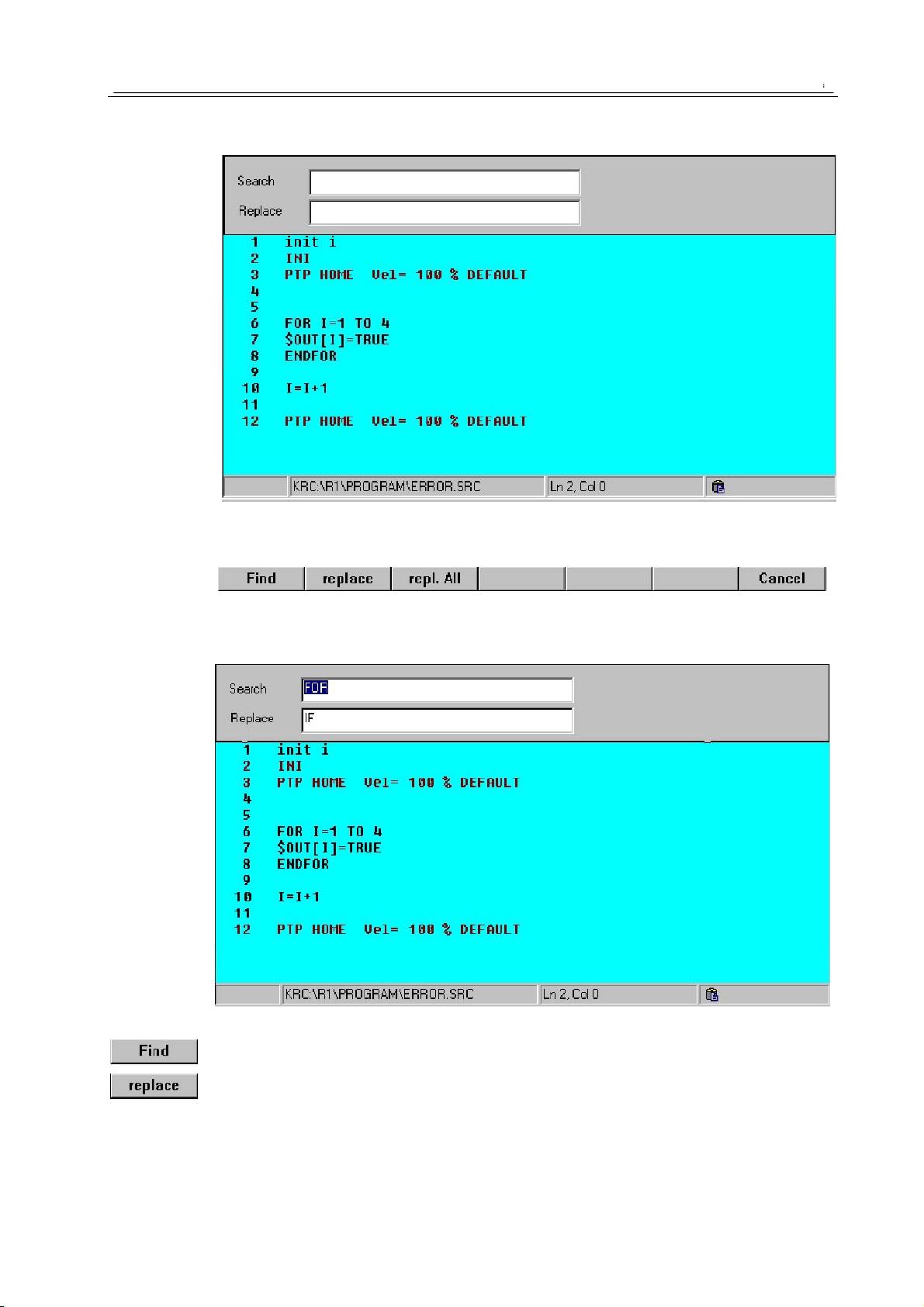
1.3.2.7 替换
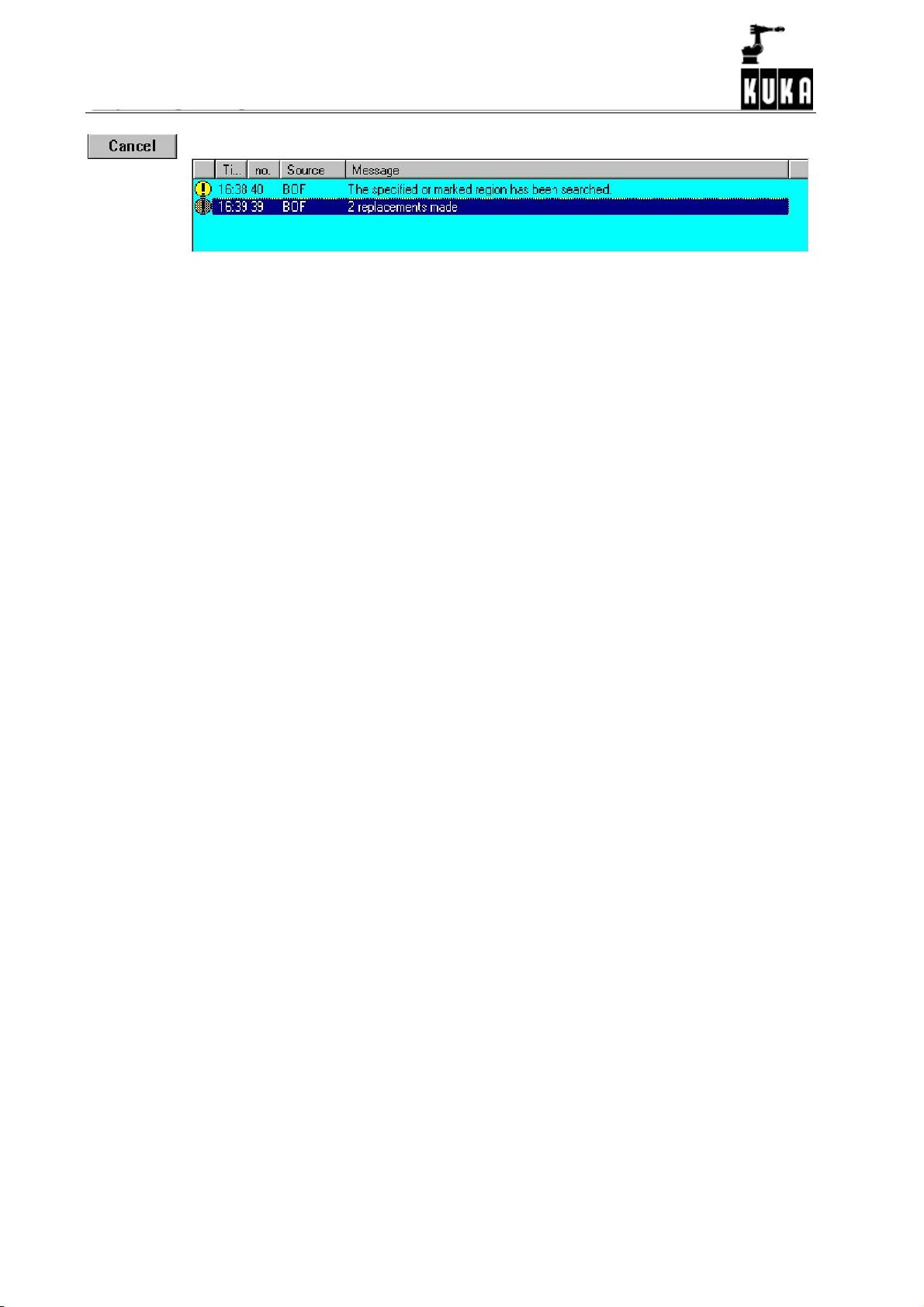
“搜索和替换”仅在专家级别模式且连接编辑器有效,该功能搜索程序(非折叠行
或打开的折叠)中的可见部分。使一个特定的字符串被另一个特定的字符串替换。
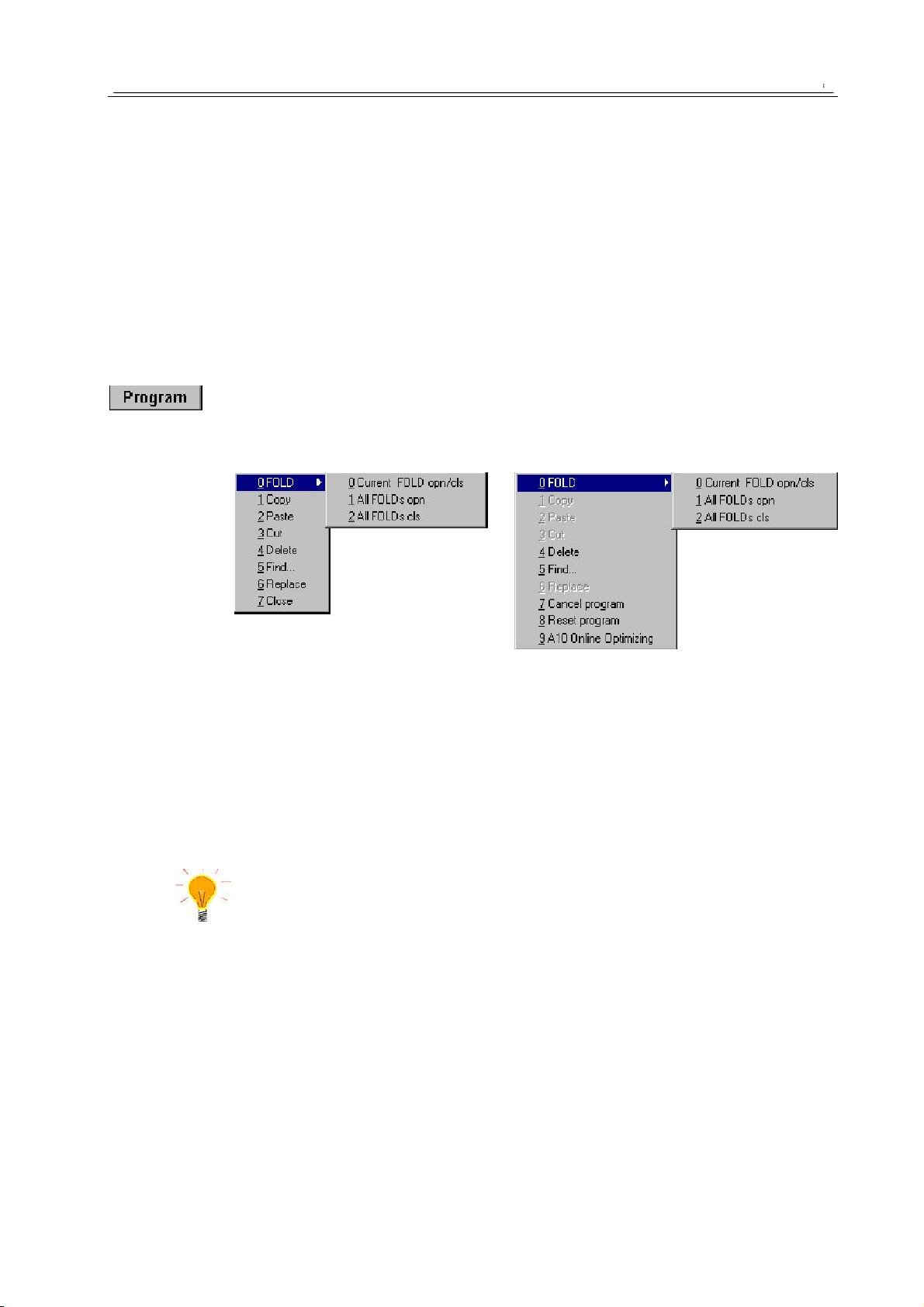
通过“程序”菜单中的“替换”选项选择该操作。

剩余217页未读,继续阅读
2023-06-21 上传
2023-05-15 上传
2023-11-26 上传
2023-08-17 上传
2023-06-06 上传
2023-06-10 上传

qq_16020349
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Aspose资源包:转PDF无水印学习工具
- Go语言控制台输入输出操作教程
- 红外遥控报警器原理及应用详解下载
- 控制卷筒纸侧面位置的先进装置技术解析
- 易语言加解密例程源码详解与实践
- SpringMVC客户管理系统:Hibernate与Bootstrap集成实践
- 深入理解JavaScript Set与WeakSet的使用
- 深入解析接收存储及发送装置的广播技术方法
- zyString模块1.0源码公开-易语言编程利器
- Android记分板UI设计:SimpleScoreboard的简洁与高效
- 量子网格列设置存储组件:开源解决方案
- 全面技术源码合集:CcVita Php Check v1.1
- 中军创易语言抢购软件:付款功能解析
- Python手动实现图像滤波教程
- MATLAB源代码实现基于DFT的量子传输分析
- 开源程序Hukoch.exe:简化食谱管理与导入功能
