KUKA TouchSense 1.3操作手册翻译:针对KUKA System Software 5.2-5.6
需积分: 11 24 浏览量
更新于2024-07-15
收藏 3.26MB PDF 举报
"TouchSense_en.pdf"文档是库卡(KUKA)公司发布的一款名为KUKA.TouchSense 1.3的触觉传感器技术手册,适用于KUKA System Software 5.2、5.3、5.4、5.5和5.6版本。该文档发行日期为2009年6月26日,由KUKA Roboter GmbH和KUKA System Technology部门提供。版权归属于KUKA Roboter GmbH,地址位于德国奥格斯堡的Zugspitzstraße 140。
这份技术文档详细介绍了如何在库卡机器人系统中集成和使用TouchSense 1.3功能,它旨在增强人机交互和机器感知能力。用户手册涵盖了安装、配置、操作以及可能存在的功能特性。由于是针对特定软件版本编写的,因此只有与指定的软件兼容时才能确保完全有效。
值得注意的是,虽然文档声称已经过检查以符合硬件和软件描述,但并不能排除所有潜在的不一致,因此KUKA Roboter GmbH并不保证完全符合性。文档内容会定期更新,以反映必要的修正和改进。同时,该文档提及的其他未在其中详细描述的功能可能是可操作的,但在没有明确说明的情况下,用户不应依赖这些额外功能,尤其是在更换或服务工作中。
此外,未经KUKA Roboter GmbH的明确许可,不得复制或向第三方透露这份文档的内容。这体现了库卡公司对知识产权的保护和对用户责任的强调。整个文档包括了79页,翻译自原始操作指南,说明其不仅限于技术规格,也包含了实际操作指导。
"TouchSense_en.pdf"文档是库卡机器人系统中一款关键的触觉感知工具的用户参考,对于理解其工作原理、优化机器人性能和避免潜在问题具有重要意义。
13 / 79Issued: 26.06.2009 Version: KST TouchSense 1.3 V1 en
3. Safety
3 Safety
3.1 General
3.1.1 Liability
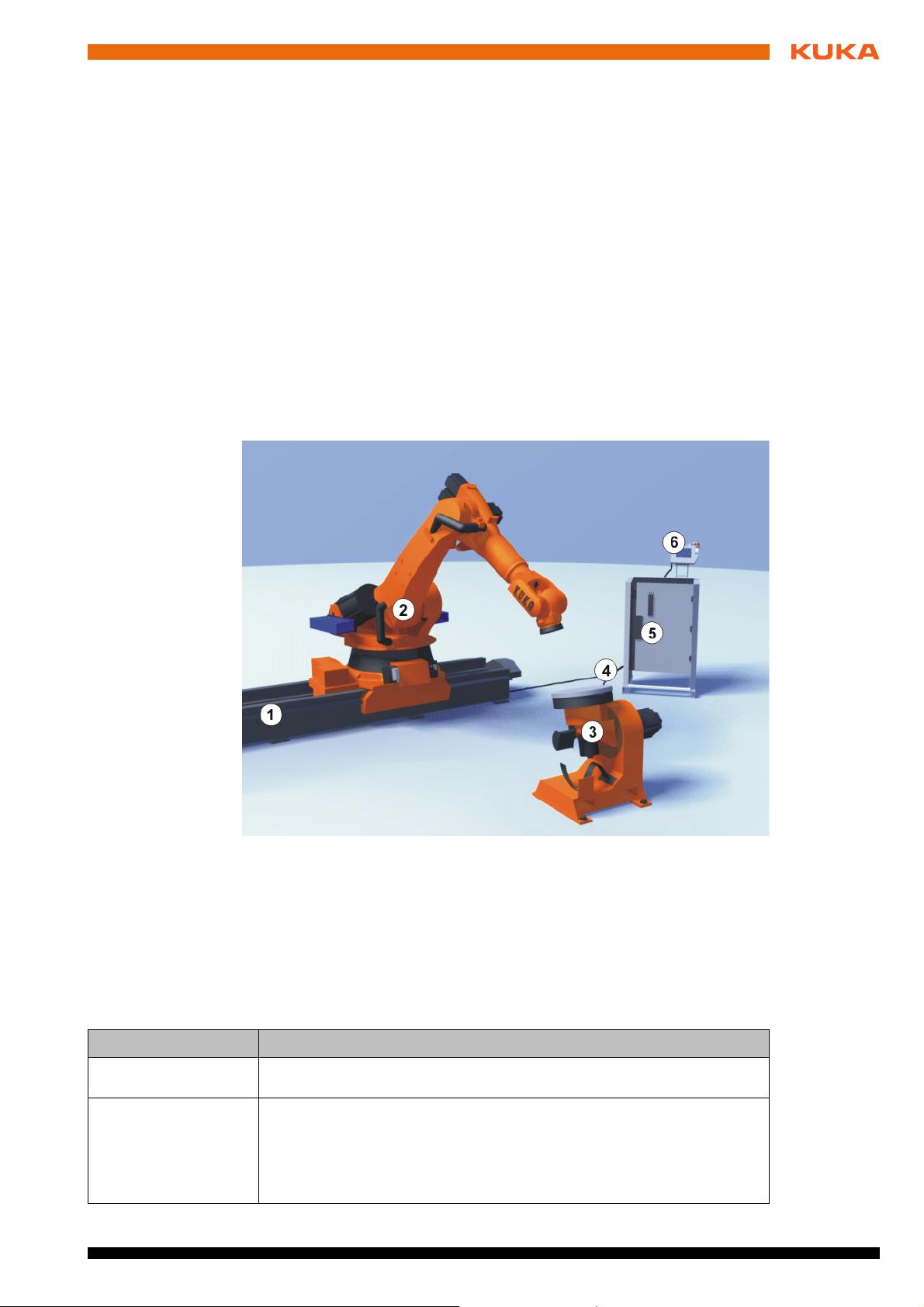
The device described in these operating instructions is an industrial robot –
called “robot system” in the following text – consisting of:
Robot
Robot controller
Teach pendant
Connecting cables
External axes, e.g. linear unit, two-axis positioner, positioner (optional)
Top-mounted cabinet (optional)
Software
Options, accessories
The robot system is built using state-of-the-art technology and in accordance
with the recognized safety rules. Nevertheless, impermissible misuse of the
robot system may constitute a risk to life and limb or cause damage to the ro-
bot system and to other material property.
The robot system may only be used in perfect technical condition in accord-
ance with its designated use and only by safety-conscious persons who are
fully aware of the risks involved in its operation. Use of the robot system is sub-
ject to compliance with these operating instructions and with the declaration of
incorporation supplied together with the robot system. Any functional disor-
ders affecting the safety of the robot system must be rectified immediately.
Safety infor-
mation
Safety information cannot be held against KUKA Roboter GmbH. Even if all
safety instructions are followed, this is not a guarantee that the robot system
will not cause personal injuries or material damage.
No modifications may be carried out to the robot system without the authori-
zation of KUKA Roboter GmbH. Additional components (tools, software, etc.),
not supplied by KUKA Roboter GmbH, may be integrated into the robot sys-
tem. The user is liable for any damage these components may cause to the
robot system or to other material property.
In addition to the Safety chapter, the operating instructions contain further
safety instructions. These must be observed.
3.1.2 Representation of warnings and notes
Safety Warnings marked with this pictogram are relevant to safety and must be ob-
served.
Danger!
This warning means that death, severe physical injury or substantial material
damage will occur, if no precautions are taken.
Warning!
This warning means that death, severe physical injury or substantial material
damage may occur, if no precautions are taken.

剩余78页未读,继续阅读
2015-11-02 上传
2023-07-16 上传
2022-11-14 上传
2022-11-14 上传
2022-11-14 上传
2022-11-14 上传
2019-09-05 上传
2021-07-26 上传
2022-06-19 上传

weixin_46934295
- 粉丝: 0
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- 基于Python和Opencv的车牌识别系统实现
- 我的代码小部件库:统计、MySQL操作与树结构功能
- React初学者入门指南:快速构建并部署你的第一个应用
- Oddish:夜潜CSGO皮肤,智能爬虫技术解析
- 利用REST HaProxy实现haproxy.cfg配置的HTTP接口化
- LeetCode用例构造实践:CMake和GoogleTest的应用
- 快速搭建vulhub靶场:简化docker-compose与vulhub-master下载
- 天秤座术语表:glossariolibras项目安装与使用指南
- 从Vercel到Firebase的全栈Amazon克隆项目指南
- ANU PK大楼Studio 1的3D声效和Ambisonic技术体验
- C#实现的鼠标事件功能演示
- 掌握DP-10:LeetCode超级掉蛋与爆破气球
- C与SDL开发的游戏如何编译至WebAssembly平台
- CastorDOC开源应用程序:文档管理功能与Alfresco集成
- LeetCode用例构造与计算机科学基础:数据结构与设计模式
- 通过travis-nightly-builder实现自动化API与Rake任务构建
