激光雷达新体制:非视域三维成像的进展与应用
版权申诉
42 浏览量
更新于2024-06-28
1
收藏 777KB DOCX 举报
非视域三维成像激光雷达的研究进展是一个关键领域,它的发展源于军事侦察、安防反恐以及灾难救援等领域的实际需求,特别是对于隐藏目标的探测。这种技术旨在解决目标被遮挡时的成像问题,通过收集与目标相关的环境信号,利用复杂的信号处理算法进行重构,从而获取目标的三维信息。
非视域成像激光雷达的核心原理基于激光脉冲飞行时间测量方法,通过激光脉冲主动照明,光脉冲经过多次漫反射,如图1所示的成像构型。光在经过目标两次或更多次散射后返回探测器,其中包含了目标的信息。整个过程可以分为四个阶段:发射、一次散射、二次散射和接收。目标的反射率分布ρ(xu)和光在各个阶段的传播关系H(xp,xc,t,xu)共同决定了接收到的信号。
激光雷达的新体制,即非视域三维成像,其工作方式类似于传统激光雷达,但增加了对被遮挡目标的探测能力。这对于自动驾驶汽车等应用尤为重要,特别是在视线受限的情况下,能帮助车辆提前感知周围环境,包括车辆和行人,显著提高行驶安全性。
研究进展方面,近年来的焦点在于提高成像分辨率、降低噪声干扰、优化信号处理算法,以及实现更远距离的目标探测。研究人员正在探索结合其他成像技术(如热成像、声波测量等)的可能性,以进一步增强非视域成像的精度和鲁棒性。
此外,非视域三维成像激光雷达的发展也面临挑战,如信号衰减、多径效应、环境因素的影响等,这些问题都需要通过技术创新和理论研究来解决。随着无人驾驶技术的不断发展,对这种新型激光雷达的需求将更加迫切,预计未来的研究将着重于提升其实时性和智能化水平,以适应不断变化的应用环境。
总结来说,非视域三维成像激光雷达是现代科技发展中的一项重要突破,它结合了光学、信号处理和系统工程的多个学科,为隐藏目标探测提供了新的解决方案,并将在自动驾驶、安全监控等多个领域发挥重要作用。
下载: 全尺寸图片 幻灯片
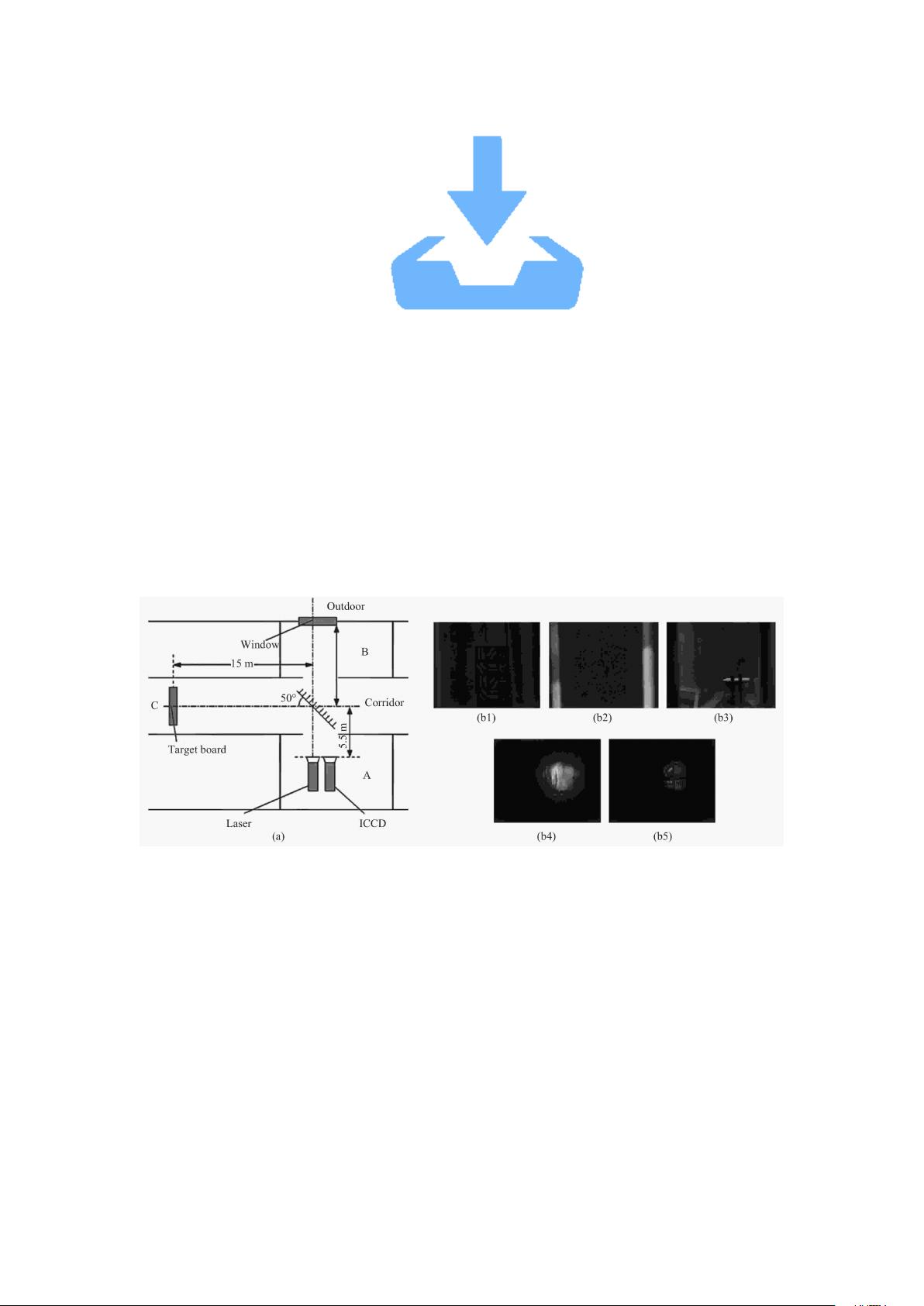
2015 年,海军工程大学的韩宏伟等人基于窄脉冲激光器和 ICCD 搭建了非视域主动成
像实验系统。激光器工作波长为 532 nm,最大重复频率 10 Hz,单脉冲能量 80 mJ,脉宽
为 10 ns。ICCD 的最小选通门宽 1.5 ns。以玻璃作为中介反射面,以黑白条纹靶板作为目
标,对目标和周围环境处于不同光照情形时系统的非视域成像效果进行测试。结果表明,
基于距离选通的非视域成像技术是一种能够在不同光照条件下实现对视觉盲区进行有效观
察的成像技术
[15]
,见图 4。图 4(b1)为 C 处开灯,非距离选通成像,图 4(b2)为 A 处开灯,非
距离选通成像,图 4(b3)为 B 处开灯,非距离选通成像,图 4(b4)为距离选通成像, 延迟时间
为 0 ns,图 4(b5)为距离选通成像,延迟时间为 20 ns。
图 4 不同背景光照下借助玻璃进行非视域成像的实验结果
[15]
。(a) 实验场景示意图;
(b1)~(b5)不同条件下的实验结果
Fig. 4 Experimental results of non-line-of-sight imaging with glass under different background
lights
[15]
. (a) Schematic diagram of the experimental scene; (b1)-(b5) Experimental results under
different conditions
剩余24页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-02-23 上传
2022-12-15 上传
2020-06-04 上传
2023-02-23 上传

罗伯特之技术屋
- 粉丝: 4493
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- JavaScript实现的高效pomodoro时钟教程
- CMake 3.25.3版本发布:程序员必备构建工具
- 直流无刷电机控制技术项目源码集合
- Ak Kamal电子安全客户端加载器-CRX插件介绍
- 揭露流氓软件:月息背后的秘密
- 京东自动抢购茅台脚本指南:如何设置eid与fp参数
- 动态格式化Matlab轴刻度标签 - ticklabelformat实用教程
- DSTUHack2021后端接口与Go语言实现解析
- CMake 3.25.2版本Linux软件包发布
- Node.js网络数据抓取技术深入解析
- QRSorteios-crx扩展:优化税务文件扫描流程
- 掌握JavaScript中的算法技巧
- Rails+React打造MF员工租房解决方案
- Utsanjan:自学成才的UI/UX设计师与技术博客作者
- CMake 3.25.2版本发布,支持Windows x86_64架构
- AR_RENTAL平台:HTML技术在增强现实领域的应用
