智能手机深度相机技术解析:TOF原理与组件
需积分: 0 123 浏览量
更新于2024-08-04
收藏 1.36MB DOCX 举报
"智能手机双摄像头中的RGB + Depth1技术解析"
在智能手机摄像头领域,RGB + Depth1的组合是实现3D感知和增强现实(AR)的关键技术。RGB相机负责捕捉色彩信息,而Depth相机则提供景深数据,即物体与相机之间的距离信息。这种结合使得设备能够理解其周围的三维环境,从而实现更精准的图像处理和交互功能。
深度相机,特别是基于TOF(Time-of-Flight)原理的相机,已经成为主流选择。TOF相机通过测量光脉冲从发射到反射回传感器的时间来计算距离,这一过程类似于3D激光传感器的工作方式,但TOF相机能同时获取整个图像的深度信息,而无需逐点扫描。
TOF相机主要由以下几个关键组件构成:
1、照射单元:使用经过脉冲调制的光源,通常为红外LED或激光二极管,以高频率发射光脉冲。光源的精确控制至关重要,任何微小的时间偏差都可能导致显著的距离测量误差。
2、光学透镜:透镜系统负责收集反射回来的光,并在成像传感器上形成图像。为了减少噪声和防止过度曝光,会添加带通滤光片,允许特定波长的红外光通过。
3、成像传感器:这是TOF相机的核心,它的结构比普通图像传感器复杂,具有多个快门,能在不同时间捕获反射光线。每个像素的尺寸通常较大,以便更好地接收和处理光脉冲信号。
4、控制单元:相机的电子控制单元负责触发光脉冲序列,并同步电子快门的开启和关闭,确保测量的精确性。
RGB + Depth1的组合在智能手机中被广泛应用,如人脸识别、背景虚化、AR游戏和应用等。通过深度信息,手机可以创建真实世界的数字模型,实现更加沉浸式的用户体验。例如,在拍照时,Depth相机可以帮助创建专业级的景深效果,使主体更为突出;在AR应用中,它可以识别和追踪用户周围的物体,为虚拟内容的叠加提供准确的定位。
RGB + Depth1的双摄像头系统是现代智能手机实现高级功能的重要硬件基础,它融合了传统的色彩捕捉与创新的深度感知技术,为移动设备带来了前所未有的视觉体验和交互可能性。随着技术的不断进步,我们可以期待未来智能手机摄像头将带来更多的创新应用。
计算单元可以记录精确的深度图。深度图通常是灰度图,其中的每个值代表光反射表面和相
机之间的距离。为了得到更好的效果,通常会进行数据校准。
TOF 测距原理
下面来介绍一个经过高度简化的测距原理。
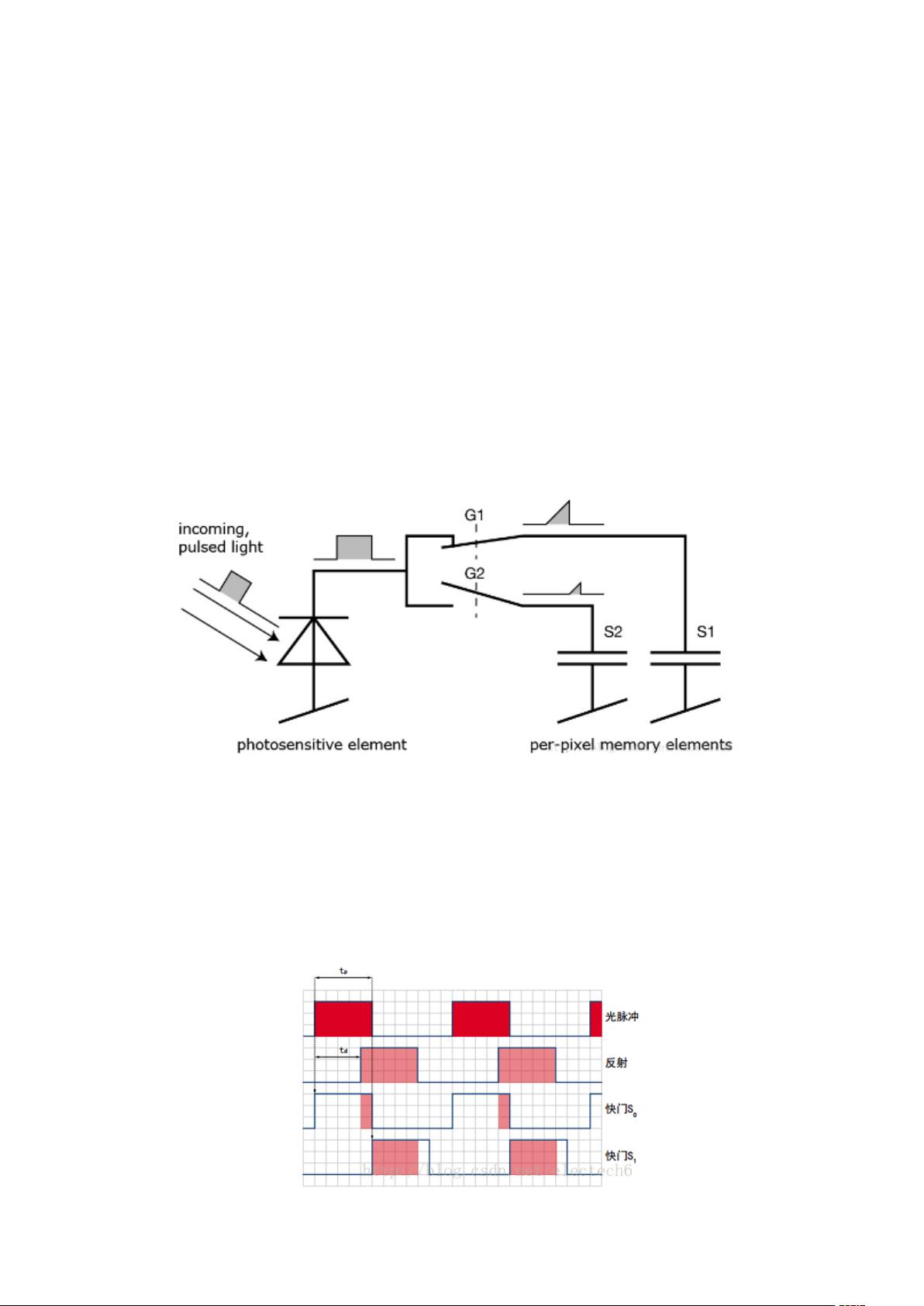
照射光源一般采用方波脉冲调制,这是因为它用数字电路来实现相对容易。深度相机的每个
像素都是由一个感光单元(如光电二极管)组成,它可以将入射光转换为电流,感光单元连
接着多个高频转换开关(下图的 G1,G2)可以把电流导入不同的可以储存电荷(下图 S1,
S2)的电容里。
相机上的控制单元打开光源然后再关闭,发出一个光脉冲。在同一时刻,控制单元打开和关
闭芯片上的电子快门。由光脉冲以这种方式产生的电荷 S0 存储在感光元件上。
然后,控制单元第二次打开并关闭光源。这次快门打开时间较晚,即在光源被关闭的时间点
打开。现在生成的电荷 S1 也被存储在感光元件上。
剩余12页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2024-06-14 上传
点击了解资源详情
2020-12-19 上传
2021-05-13 上传
点击了解资源详情
点击了解资源详情

张博士-体态康复
- 粉丝: 35
- 资源: 307
 我的内容管理
展开
我的内容管理
展开







最新资源
- torch_scatter-2.0.9-cp38-cp38-win_amd64whl.zip
- torch_scatter-2.0.8-cp39-cp39-linux_x86_64whl.zip
- torch_cluster-1.5.9-cp38-cp38-linux_x86_64whl.zip
- torch_scatter-2.0.9-cp38-cp38-linux_x86_64whl.zip
- torch_scatter-2.0.8-cp38-cp38-linux_x86_64whl.zip
- torch_cluster-1.5.9-cp36-cp36m-win_amd64whl.zip
- torch_scatter-2.0.7-cp37-cp37m-win_amd64whl.zip
- torch_scatter-2.0.9-cp37-cp37m-win_amd64whl.zip
- torch_scatter-2.0.8-cp37-cp37m-linux_x86_64whl.zip
- torch_cluster-1.5.9-cp37-cp37m-linux_x86_64whl.zip
- torch_scatter-2.0.8-cp37-cp37m-win_amd64whl.zip
- torch_scatter-2.0.9-cp36-cp36m-win_amd64whl.zip
- torch_scatter-2.0.7-cp36-cp36m-win_amd64whl.zip
- torch_cluster-1.5.9-cp36-cp36m-linux_x86_64whl.zip
- torch_scatter-2.0.8-cp36-cp36m-linux_x86_64whl.zip
- torch_scatter-2.0.9-cp37-cp37m-linux_x86_64whl.zip
