小型码垛机器人设计与控制系统研究
版权申诉
本文档详细介绍了码垛机器人设计的基本原理和关键步骤,针对当前制造业中的多样化、小批量生产趋势,码垛机器人作为自动化解决方案的重要性日益凸显。首先,背景章节回顾了我国码垛机器人自20世纪80年代以来的发展历程,从第一代的简单再现功能机器人到第三代具备人工智能的智能机器人,展现了技术的迭代进步。
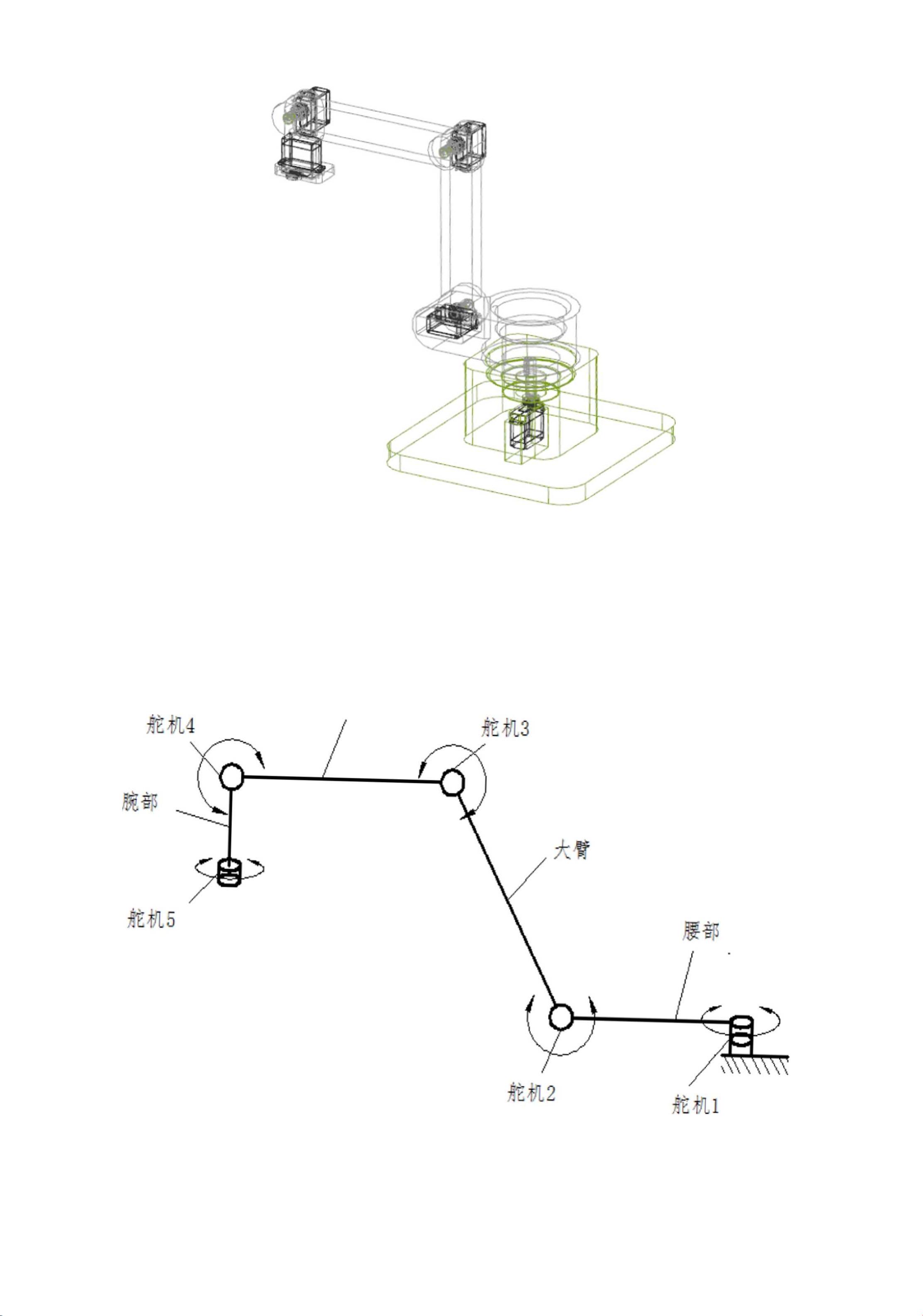
在机械结构设计部分,文档强调了四个主要环节:总体设计要求、机械部分的整体布局、电机的选择以及各部位如底座、腰部、臂部(包括大臂和小臂)和腕部的具体设计。特别指出,由于码垛机器人通常需要高精度和灵活性,所有关节采用转动关节,而舵机传动方案被选中,以确保精确的运动控制。通过受力分析,设计者确保机器人结构在承受工作负载时能满足强度和刚度标准。
控制系统设计章节涉及运动轨迹和运动函数的分析,这在保证机器人高效执行码垛任务的同时,也确保了其动态性能的优化。运动分析对于机器人路径规划和控制算法至关重要,它决定了机器人在完成复杂动作时的流畅性和精度。
此外,文档还提到,码垛机器人在实际应用中有两大主要领域:一是恶劣工作环境下的危险作业,如采矿、锻造等,二是自动化生产线上,负责物料搬运、码垛和抓取等任务,通过减少人力成本和提高生产效率来提升制造业的竞争力。
关键词:码垛机器人、机器人技术、动态性能、机械结构、控制系统、运动分析。通过本文的设计,我们可以看到码垛机器人在现代制造业中的核心地位及其技术细节,以及如何通过科学的设计方法实现高效、安全的自动化操作。
图
2
_
2
_
2
码垛机器人线形图
小
賢
2-2-3码垛机器人结构简图

剩余35页未读,继续阅读
171 浏览量
2021-10-08 上传
125 浏览量
135 浏览量

omyligaga
- 粉丝: 97
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- study
- 行业文档-设计装置-一种共轴高速永磁同步电机互馈测试平台.zip
- UE4NaveAula:Projeto基地,中殿光环。 虚幻引擎的动态处理程序
- 进销存ERP管理系统高保真原型 - HTML.zip
- bookmarklet-demo
- stm32电子秤.zip
- Draft Wed Oct 17 20:38:43 CST 2018-数据集
- 使用winrt-rs的robmikh / Minesweeper端口。-Rust开发
- 2020TI杯模拟电子系统邀请赛比赛现场u盘内容 RSLK+MMWAVE 资料包
- erp-pro-master.zip
- coursera吴恩达机器学习课程作业自写Python版本+Matlab原版
- 六步学会用MATLAB做空间计量回归详细步骤,如何用matlab做回归分析,matlab
- AssignmentWeek05
- Petabridge.Phobos.Web.InfluxDb:使用InfluxDb启用Phobos的Akka.NET + ASP.NET Core应用程序
- inventory-service
- Microsoft Remote Desktop for Mac 10.4.1
