YOLO算法详解:快速实时目标检测
需积分: 12 162 浏览量
更新于2024-08-05
收藏 1.88MB PDF 举报
"本文介绍了目标检测的重要性以及两种主要的算法类别:基于推荐区域的R-CNN系列和one-stage的Yolo算法。重点讲述了Yolo(You Only Look Once)算法的特性,包括其统一、实时和高效的优点。文章首先对比了YoloV1与R-CNN,指出YoloV1通过预定义的候选区(网格)进行对象预测,减少了计算复杂性,实现了更快的检测速度。接着,文章详细介绍了YoloV1的架构,包括将图像分割为7x7的网格,每个网格预测两个边界框,总计98个边界框作为候选对象。这种方法简化了对象检测流程,省去了R-CNN中的候选区域生成和后续的边框回归步骤。"
在计算机视觉领域,目标检测是一项关键技术,它涉及到识别图像中的特定对象并确定它们的位置。R-CNN系列算法(如R-CNN、Fast R-CNN、Faster R-CNN)采用两阶段方法,首先生成候选区域,然后进行分类和边界框调整,这保证了较高的精度但牺牲了速度。而Yolo(You Only Look Once)是一种单阶段的目标检测算法,它通过一个统一的神经网络模型直接预测物体类别和位置,从而实现更快的检测速度,尽管牺牲了一些准确性。
YoloV1的创新之处在于其设计思路:它将图像划分为固定大小的网格,并让每个网格负责预测其覆盖区域内的物体。每个网格可以预测多个边界框,这样可以覆盖各种尺寸和位置的对象。虽然这种方法可能导致误报(false positives),但它极大地提高了检测速度,使得Yolo适用于实时应用,如自动驾驶汽车和监控系统。
YoloV1的后续版本,如YoloV2和YoloV3,进一步改进了模型结构,引入了锚点(Anchors)来适应不同比例和形状的对象,增强了模型的准确性。同时,这些版本还优化了网络设计,比如使用卷积层的残差连接,提高了模型的训练效率和检测性能。
Yolo系列算法在目标检测领域具有重要的地位,它的设计理念和实施策略为计算机视觉的研究提供了新的视角和方向。结合深度学习的力量,Yolo展示了实时目标检测的潜力,同时也推动了整个AI领域的发展,尤其是在自动驾驶、无人机导航、智能安全等领域有广泛的应用。
AI、深度学习与计算机视觉(续、深度学习与计算机视觉(续2))
AI、深度学习与计算机视觉(续2)
筑博智慧建筑研究中⼼
前⾔
⽬标检测可以看成图像分类与定位的结合,给定⼀张图⽚,⽬标检测系统要能够识别出图⽚的⽬标并给出其位置,由于图⽚中⽬标数是不定的,且要给出⽬标的精确位置,⽬标检测相⽐分类任务更复
杂。
⽬标检测领域⽐较流⾏的算法可以分为两类,⼀类是基于推荐区域(Region Proposal)的R-CNN系算法(R-CNN,Fast R-CNN,Faster R-CNN,前⽂我们已有介绍),它们是two-stage的,需要先使⽤
启发式⽅法(selective search)或者CNN⽹络RPN(Region Proposal network)产⽣推荐区域,然后再在推荐区域上做分类与回归;⽽另⼀类是Yolo,SSD这类one-stage算法,其仅仅使⽤⼀个CNN
⽹络直接预测不同⽬标的类别与位置。第⼀类⽅法是准确度⾼⼀些,但是速度慢,但是第⼆类算法是速度快,但是准确性要低⼀些。
本⽂介绍的是以Yolo为主one-stage算法,Yolo其全称是You Only Look Once: Unified,Real-Time Object Detection,这个标题基本上把Yolo算法的特点概括全了:You Only Look Once说的是只需要⼀次
CNN运算,Unified指的是这是⼀个统⼀的框架,提供end-to-end的预测,⽽Real-Time体现是Yolo算法速度快。
⼀、YOLO V1
1.概述
与R-CNN相⽐,实际上YOLO V1并没有真正去掉候选区,⽽是采⽤了预定义的候选区(准确点说应该是预测区,因为并不是Faster RCNN所采⽤的锚Anchor)。也就是将图⽚划分为7*7=49个⽹格
(grid),每个⽹格允许预测出2个边框(bounding box,即包含某个对象的矩形框),总共49*2=98个bounding box。可以理解为98个候选区,它们很粗略的覆盖了图⽚的整个区域。
RCNN虽然会找到⼀些候选区,但毕竟只是候选,等真正识别出其中的对象以后,还要对候选区进⾏微调,使之更接近真实的边框,这个过程就是边框回归。
既然反正最后都是要调整的,⼲嘛还要先费劲去寻找候选区呢,⼤致有个区域范围就⾏了,所以YOLO就这么⼲了。
YOLO检测系统简单直接,可以看做只有三步:
1)YOLO检测系统先将输⼊图像调整到448×448;
2)在图像上运⾏卷积⽹络;
3)通过模型的置信度对结果进⾏阈值检测。
图1Yolo检测系统
2.原理与结构
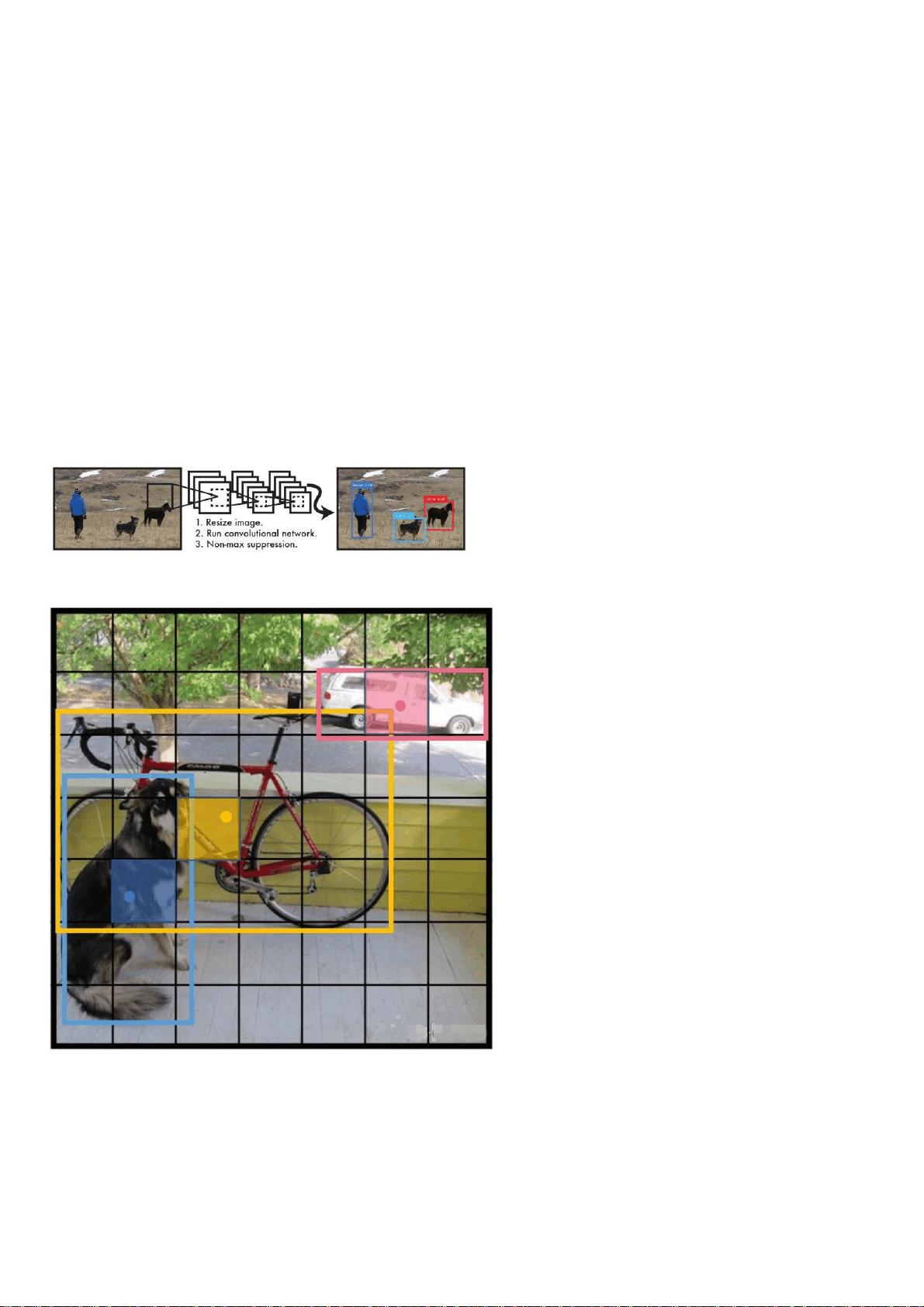
具体来说,Yolo V1的CNN⽹络将输⼊的图
⽚分割成7*7个⽹格,然后每个单元格负责去检
测那些中⼼点落在该格⼦内的⽬标,如图2所⽰,
可以看到狗这个⽬标的中⼼落在左下⾓⼀个单元
格内,那么该单元格负责预测这个狗。每个单元
格会预测2个边界框(bounding box)以及边
界框的置信度(confidence score)。
图2⽹格划分与检测职责
⽽所谓置信度其实包含两个⽅⾯,⼀是这个边界框含有⽬标的可能性⼤⼩,⼆是这个边
下载后可阅读完整内容,剩余7页未读,立即下载
2022-04-13 上传
2021-08-19 上传
2021-04-25 上传
2021-09-28 上传
2024-04-28 上传
2022-10-26 上传
2021-08-18 上传
2021-08-18 上传
2021-08-18 上传

_webkit
- 粉丝: 30
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 构建基于Django和Stripe的SaaS应用教程
- Symfony2框架打造的RESTful问答系统icare-server
- 蓝桥杯Python试题解析与答案题库
- Go语言实现NWA到WAV文件格式转换工具
- 基于Django的医患管理系统应用
- Jenkins工作流插件开发指南:支持Workflow Python模块
- Java红酒网站项目源码解析与系统开源介绍
- Underworld Exporter资产定义文件详解
- Java版Crash Bandicoot资源库:逆向工程与源码分享
- Spring Boot Starter 自动IP计数功能实现指南
- 我的世界牛顿物理学模组深入解析
- STM32单片机工程创建详解与模板应用
- GDG堪萨斯城代码实验室:离子与火力基地示例应用
- Android Capstone项目:实现Potlatch服务器与OAuth2.0认证
- Cbit类:简化计算封装与异步任务处理
- Java8兼容的FullContact API Java客户端库介绍
