基于光电对管与单片机的自动循迹小车设计详解
本篇文档是关于机电工程学院自动化专业2017级学生龚载仁、舒贤宇、陈嘉熙和续晗的课程设计报告,主题为"基于光电对管的自动循迹小车"。他们最初计划设计一个基于超声波传感器的避障小车,但由于技术难度较高和实现复杂,最终选择了更为实用且技术基础扎实的光电对管作为检测手段。
设计目标是利用红外光电对管感知地面的黑色路径,通过光电效应将光信号转化为电信号,单片机接收到信号后处理,然后控制电机驱动模块驱动小车沿路径行驶。红外光电对管由红外发射管和光敏接收管组成,工作时红外发射管发出红外光,光敏接收管在光线照射下产生光电流,这种电流的强弱与入射光强度成正比。
电路设计部分,他们采用了直流驱动红外探测器电路,其中L298N芯片是关键组件,作为H桥集成电路,它可以提供高达4A的电流驱动大功率直流电机。L298N的特点是能直接与单片机连接,实现电机的正反转控制。作者还提供了L298N的内部原理图,显示了其工作原理。
方案确定阶段,设计团队考虑了两个选项:方案一是采用两组对称的光电对管循迹模块,配合双层板小车底盘、两个L298N驱动模块和STC89C52RC单片机最小系统,方案的优点在于结构简洁、编程方便且成本适中。
整个设计过程中,作者强调了团队协作与理论知识的应用,同时欢迎读者提出批评和建议,以改进和完善设计。这份报告不仅包含了技术原理的阐述,也展示了实际操作和项目管理的技巧,对于学习嵌入式系统、单片机和光电传感器应用的学生来说,具有很高的参考价值。
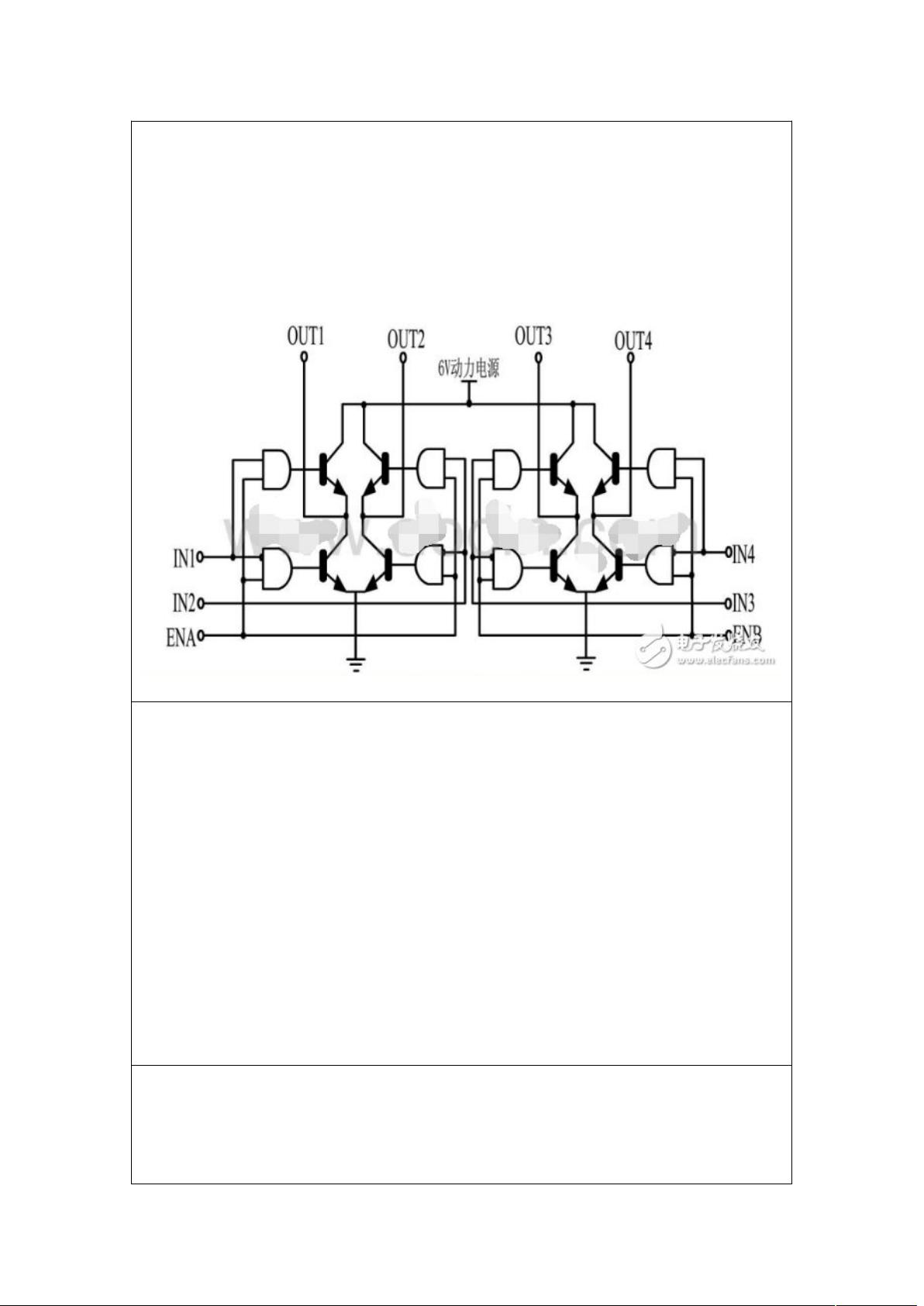
电机,电磁阀等,特别是其输入端可以与单片机直接相联,从而很方便地受单
片机控制。当驱动直流电机时,可以直接控制步进电机,并可以实现电机正转
与反转,实现此功能只需改变输入端的逻辑电平。
L298N 的内部原理图
三、方案确定:
最初我们拟定了两套方案:
方案一: 两组对称红外光电对管循迹模块+带四个减速电机的双层板小车
底盘 +两个 L298N 电机驱动模块+51 单片机最小系统板 STC89C52RC
优点:结构简单、程序易于编写、价格相对便宜
缺点:检测精确度低、灵敏度低; 循迹范围窄
方案二:五组红外光电对管循迹模块+带四个减速电机的双层板小车底盘 +
两个 L298N 电机驱动模块+51 单片机最小系统板 STC89C52RC
优点:检测准确度高、循迹范围广、容错率高
缺点:结构复杂、程序编写难度大、成本高
综合考虑各方面因素,我们决定采用方案二完成设计。相较于方案一的性能
缺憾,我们认为方案二在难度上的困难在我们组员间的齐心协力下可以克服,
价格方面虽然相对较高但也在承受范围之内。
确定方案之后,我们紧接着就在电商平台下单,完成了相关零部件的采购。
四、器件参数:
(1)红外光电对管循迹模块
剩余11页未读,继续阅读
2024-06-26 上传
2021-10-02 上传
2021-10-08 上传
2024-06-26 上传
2022-11-12 上传
2023-07-04 上传
2023-07-02 上传

Nigelsu
- 粉丝: 11
- 资源: 27
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular程序高效加载与展示海量Excel数据技巧
- Argos客户端开发流程及Vue配置指南
- 基于源码的PHP Webshell审查工具介绍
- Mina任务部署Rpush教程与实践指南
- 密歇根大学主题新标签页壁纸与多功能扩展
- Golang编程入门:基础代码学习教程
- Aplysia吸引子分析MATLAB代码套件解读
- 程序性竞争问题解决实践指南
- lyra: Rust语言实现的特征提取POC功能
- Chrome扩展:NBA全明星新标签壁纸
- 探索通用Lisp用户空间文件系统clufs_0.7
- dheap: Haxe实现的高效D-ary堆算法
- 利用BladeRF实现简易VNA频率响应分析工具
- 深度解析Amazon SQS在C#中的应用实践
- 正义联盟计划管理系统:udemy-heroes-demo-09
- JavaScript语法jsonpointer替代实现介绍
