四元数解析:旋转与惯导中的核心工具
需积分: 9 101 浏览量
更新于2024-09-04
收藏 594KB DOCX 举报
四元数理解要义-用于分解旋转角和加速度文档深入探讨了四元数在计算机图形学、运动学和惯性导航系统中的关键作用。首先,作者强调了传统旋转表示方法如矩阵和欧拉角的局限性,矩阵虽然强大但计算复杂,而欧拉角则受限于定轴和顺序问题,可能导致错误。四元数(Quarternion)正是为解决这些问题而诞生,它是一种简洁且有效的描述三维空间旋转的方式,其本质是一个包含向量部分和标量部分的数学结构,通常写作(q=(x,y,z),w)的形式。
四元数的构造涉及四个变量x, y, z, w,其中(x, y, z)构成三维向量,w作为标量。四元数的表示形式允许直观地处理旋转,避免了旋转矩阵中的复杂数学运算,对于连续的旋转变化,如加速度和速度的计算,四元数提供了更为精确和高效的解决方案。
在应用实例中,四元数被用来解决旋转问题,如给定一个向量P和旋转轴u,通过四元数运算可以方便地找到旋转后的向量P'。在惯性导航领域,四元数被用于根据加速度和姿态数据进行实时的位置和姿态更新,通过集成算法实现无需外部信号的自主导航,这就是惯性导航系统的运作原理。
陀螺仪是实现惯性导航的核心元件,最初是基于机械原理的装置,现在电子陀螺仪广泛应用于手机等设备,但其精度可能受到机电式陀螺仪性能的影响。高精度的激光陀螺仪则表现出色,它们能持续测量坐标系内三个轴的加速度和角速度,尽管这些测量值会随着陀螺仪自身移动而变化,但四元数的处理技术可以有效地处理这种变化。
最后,文档提到坐标系变换的概念,陀螺仪的初始位置(坐标系A)与变换后的位置(坐标系B)之间的关系,是通过四元数运算来实现的,这在处理传感器数据和坐标转换时至关重要。四元数不仅是描述和计算旋转的高效工具,还在现代科技,特别是那些依赖精确位置跟踪和姿态控制的领域,发挥着不可替代的作用。
生词表:
简而言之: bref
PS: postscript 备注,附录
Quarternion: 四元数
WTH: what the hell. 什么鬼东西? 形同 What
BTW: by the way: 顺便说下
一.WTH is 四元数
要向描述一个旋转变幻的“动作”,大家最常用的方法想必是矩阵或者可爱的欧拉角。旋转矩阵,大家想必知道它有多么万能,也肯定明白算起来多么 X 疼,尤其是写
码的时候,写起来恶心不说,还浪费大量计算资源。而欧拉角,虽然计算简单,但由于旋转有定轴和顺序这一限制,就愉快地经常导致自己坑自己的现象。。。比如。。 。
万向节锁.
bref . 四元数(Quarternion)应运而生~. 四元数的本质,就是旋转动作的一种描述方式
二.四元数的构造
Q:四元数到底是个什么东西?
顾名思义,四元数,由四个变量组成:x,y,z,w。其中 x,y,z 一看就是 3p 的料,所以经常被写成:((x,y,z),w)的形式。其实应该也能看出来,其实四元数就是一
个向量和一个标量。。。可以简记为:(v,w),v=(x,y,z)。。。
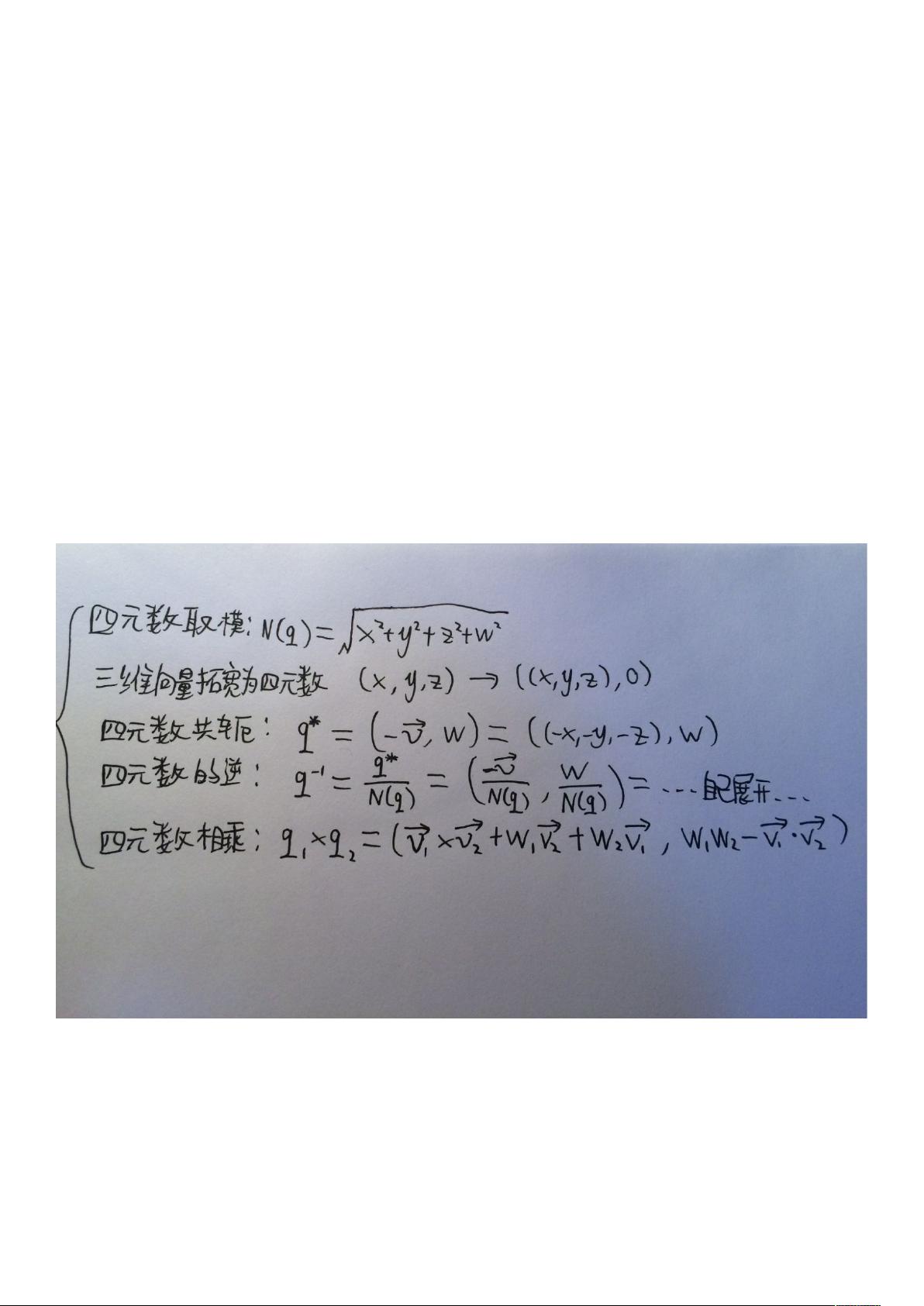
三.四元数的意义及运算
四元数的表示形式:q=((x,y,z),w),怎么用?
四元数相乘记得分清向量的叉乘和点乘.
应用实例:
已知一个向量 P=(a,b,c),以另一个单位向量 u=(x,y,z)为旋转轴,使 p 旋转 theta 度,求旋转后得到的向量 P’;
下载后可阅读完整内容,剩余5页未读,立即下载
122 浏览量
点击了解资源详情
108 浏览量
2024-11-06 上传
474 浏览量
277 浏览量
452 浏览量
2022-11-27 上传
2022-11-27 上传

冰岛牛
- 粉丝: 0
- 资源: 11
 我的内容管理
展开
我的内容管理
展开







最新资源
- 关于路由器技术的基础l理论知识
- Intel 80x86 CPU系列介绍
- CPU 和GPU设计工作原理
- 理解VMware的3种网络模型
- Master Dojo
- pragmatic.programming.erlang.jul.2007.pdf
- java面试题集 pdf格式
- 计算机数字电路中的 组合逻辑电路。设计。方法。答案。。。。。。。。。
- RJ232描述,描述计算机串口通信的基础知识,也包含了一些例程
- 全国计算机四级考试笔试模拟试题2
- MAC地址的原理分析以及相关应用介绍
- vista下MySQL的安装
- java线程与并行(主要讲解java的nio包某些内容)
- ErlangProgramming.pdf
- PKI技术及应用开发指南
- Apress.Pro.EJB.3.Java.Persistence.API.
