嫦娥三号软着陆轨道设计与控制策略详解
版权申诉
73 浏览量
更新于2024-06-14
收藏 1.11MB DOCX 举报
嫦娥三号软着陆轨道设计与控制策略研究报告深入探讨了中国首次地外探测任务的关键技术挑战。该文档主要关注于嫦娥三号着陆过程中的三个关键阶段:轨道确定、主减速阶段和粗避障段。
1. 轨道确定:
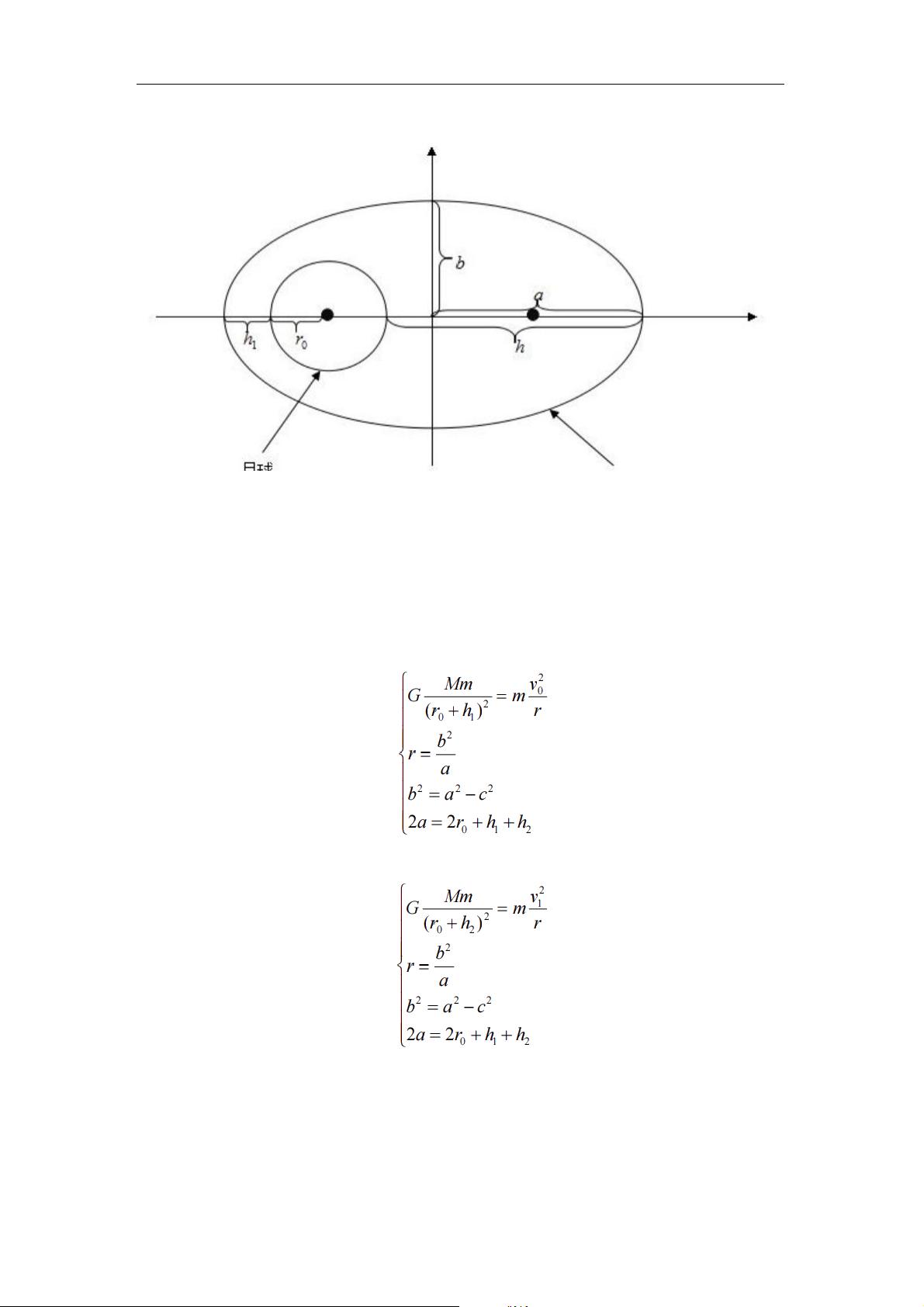
- 在着陆预备轨道上,问题被视为两体问题,通过分析系统受力,建立了归一化质心运动方程。利用开普勒第一定律和万有引力定律,确定了近日点(v0 = 1692.30m/s)和远日点(v1 = 11614.01m/s)的速度,以及其他轨道参数(具体数据见表1)。
2. 主减速阶段:
- 为了最小化燃料消耗,将运动方程转化为状态方程形式,构建哈密顿函数并应用Pontryagin极大值原理,找到最优推力和制导率。通过两点边值问题的计算机仿真,得到此阶段各参数随时间变化的情况(如图4所示)。
3. 粗避障段:
- 该阶段采用平面直角坐标系,将探测器运动分解为垂直月面和水平避障两部分。垂直运动通过动力学方程解决,而水平避障则利用地形数据(附件3、4的高程图)找出平坦区域,结合Lommel-Seeliger光照反射模型和Shape-from-Shading方法,确定大陨石坑坐标作为特征点,以确保软着陆(如图10和图11)。
4. 优化考虑:
- 文献还提及了对月球引力摄动和月球自转等外部因素的理论分析,以识别可能对轨道产生的误差来源,并采用自适应模拟退火遗传算法对软着陆轨道进行优化,以提高精度和可靠性。
这份报告不仅详细阐述了嫦娥三号软着陆的轨道设计过程,还涉及了控制策略的制定,包括如何通过优化方法来应对复杂环境和减少燃料消耗,体现了中国航天科技在深空探测中的精密计算和智能决策能力。

6
F F
ˆ
F
, m
0
2
C
r
r
r / r
0
v
v / , / r
0
r
0
/
m
m / m
0
F / I
SP
其中, I
SP
为比冲,并且:
t t /
r /
/ r
0
则运动方程可以改写为
[4]
:
r
v
F
sin
r
2
m r
1 F
F
F / I
SP
(2)
(3)
(4)
则相应的终端约束条件为:
r
f
r
f
/ r
0
v
f
v
f
/
0
0
5.2.2 着陆准备轨道速度的建模与求解
根据开普勒第一定律, 月球的质心位于探测器椭圆轨道的一个焦点上, 设
a, b 分别为椭圆轨道的长半轴长和短半轴长(如图 2 所示)。
r
m
cos 2v
(5)
m
0

剩余60页未读,继续阅读
2019-03-08 上传
2022-08-04 上传
2021-10-08 上传
2024-05-02 上传
2024-05-02 上传
2024-05-02 上传
点击了解资源详情
2022-02-24 上传

AI拉呱
- 粉丝: 2866
- 资源: 5510
 我的内容管理
展开
我的内容管理
展开







最新资源
- 俄罗斯RTSD数据集实现交通标志实时检测
- 易语言开发的文件批量改名工具使用Ex_Dui美化界面
- 爱心援助动态网页教程:前端开发实战指南
- 复旦微电子数字电路课件4章同步时序电路详解
- Dylan Manley的编程投资组合登录页面设计介绍
- Python实现H3K4me3与H3K27ac表观遗传标记域长度分析
- 易语言开源播放器项目:简易界面与强大的音频支持
- 介绍rxtx2.2全系统环境下的Java版本使用
- ZStack-CC2530 半开源协议栈使用与安装指南
- 易语言实现的八斗平台与淘宝评论采集软件开发
- Christiano响应式网站项目设计与技术特点
- QT图形框架中QGraphicRectItem的插入与缩放技术
- 组合逻辑电路深入解析与习题教程
- Vue+ECharts实现中国地图3D展示与交互功能
- MiSTer_MAME_SCRIPTS:自动下载MAME与HBMAME脚本指南
- 前端技术精髓:构建响应式盆栽展示网站
