GUI控制无人小车位姿调试
需积分: 0 136 浏览量
更新于2024-08-05
收藏 231KB PDF 举报
"09_无人小车位姿调试1 - 使用Python和GUI进行无人车控制"
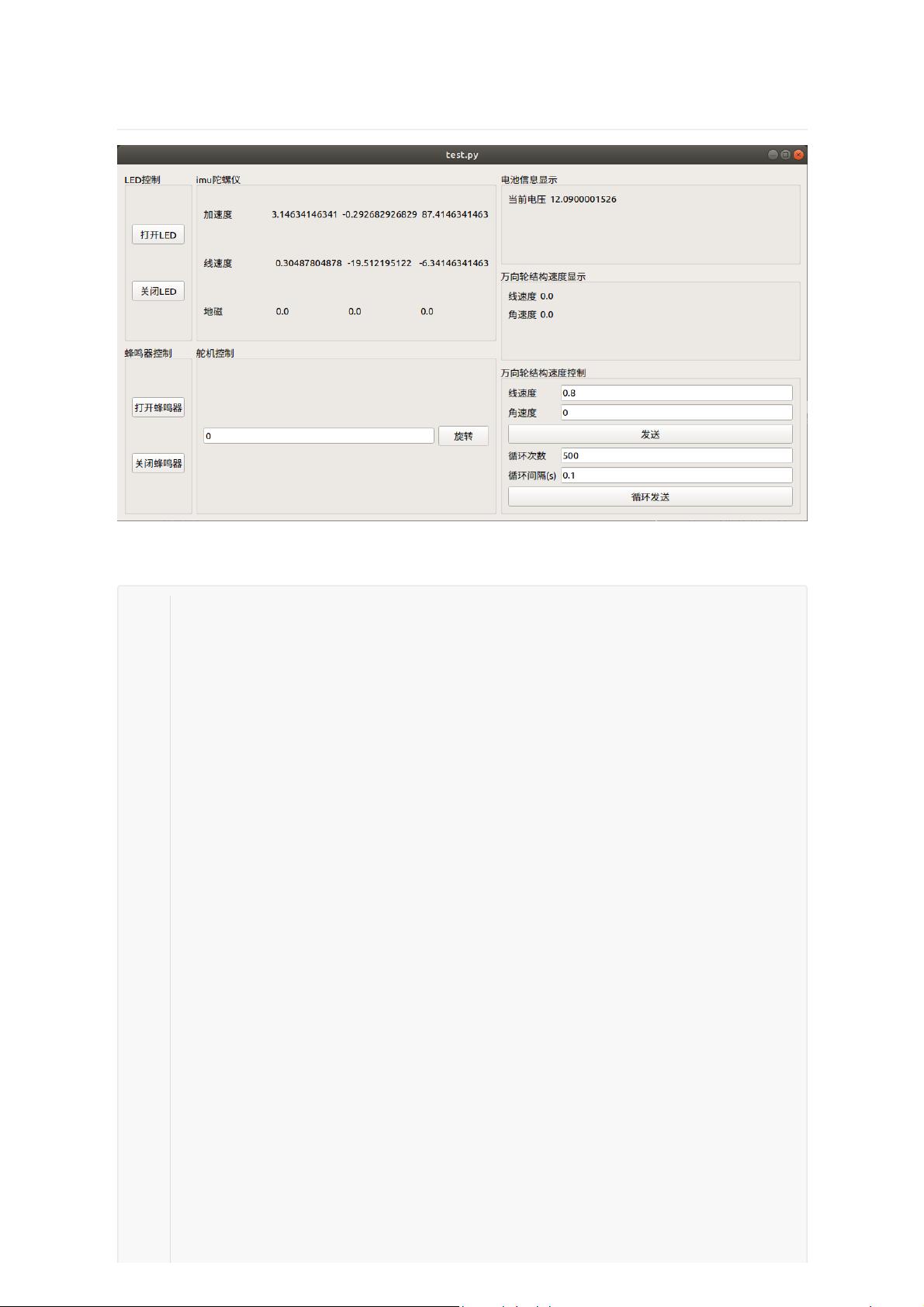
在无人小车位姿调试过程中,通常涉及到多个关键模块的集成,包括传感器数据的订阅、控制命令的发布以及用户界面(GUI)的设计。这段代码展示了如何使用Python语言,结合rospy(ROS的Python接口)和PyQt5库来实现这一目标。
首先,`CtrlWindow` 类是创建GUI窗口的基础,继承自`QWidget`。在这个类中,我们订阅了几个重要的ROS话题,用于接收来自无人车的各种传感器数据,如惯性测量单元(IMU)、磁力计、速度信息以及电池状态。这些订阅通过`rospy.Subscriber` 来实现,例如 `/zxcar/imu` 话题用于接收IMU数据,回调函数 `imu_callback` 负责处理这些数据。
接着,代码中创建了一个`Twist`类型的`vel_publisher`,用于发布控制命令到 `/zxcar/cmd_vel` 话题。这个话题是ROS标准的用于控制移动机器人速度的话题,`Twist`消息包含线速度和角速度两个部分,可以实现对无人车的精确速度控制。
在GUI布局方面,使用了`QHBoxLayout` 和 `QVBoxLayout` 来组织控件。代码中的注释表明,`first_layout` 可能是用来创建第一列布局,但未提供完整的代码,所以无法详细分析具体的GUI设计。通常,这些布局会包含滑块、按钮等控件,允许用户输入控制参数或触发特定行为,比如启动、停止、调整速度等。
此外,注意到代码中还引入了服务(Service)相关的`SetBool`,这通常用于实现简单的开/关功能,如开启或关闭某种模式。`std_srvs.srv.SetBool` 是ROS中的一个标准服务类型,它接受一个布尔值并返回相同类型的结果。虽然代码中没有展示具体的服务调用,但在实际应用中,可能会有一个服务请求来启动或停止无人车的运动。
总结一下,这个项目是基于ROS的无人车控制系统,使用Python编写GUI界面,通过订阅传感器数据并发布控制命令,实现对无人车的实时监控和控制。同时,可能还包含了服务来处理更复杂的逻辑操作,如模式切换。为了完成整个调试过程,开发者需要理解ROS的工作原理、Python编程以及GUI设计,确保无人车能够准确地响应控制指令,并根据传感器数据进行姿态调整。
GUI控制
模板Gui代码
#! /usr/bin/env python
# coding: utf-8
import rospy
from PyQt5.QtWidgets import *
from PyQt5.QtCore import *
import sys
from std_srvs.srv import SetBool, SetBoolRequest, SetBoolResponse
from sensor_msgs.msg import Imu, MagneticField, BatteryState
from geometry_msgs.msg import Twist
from std_msgs.msg import Float32
import threading
import time
class CtrlWindow(QWidget):
def __init__(self):
super(CtrlWindow, self).__init__()
imu_subscriber = rospy.Subscriber("/zxcar/imu", Imu,
self.imu_callback)
magnetic_subscriber = rospy.Subscriber("/zxcar/mag", MagneticField,
self.magnetic_callback)
vel_subscriber = rospy.Subscriber("/zxcar/get_vel", Twist,
self.vel_callback)
butter_subscriber = rospy.Subscriber("/zxcar/battery",
BatteryState, self.battery_callback)
self.vel_publisher = rospy.Publisher("/zxcar/cmd_vel", Twist,
queue_size=20)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
下载后可阅读完整内容,剩余8页未读,立即下载
738 浏览量
570 浏览量
446 浏览量
293 浏览量
570 浏览量
2022-09-19 上传
284 浏览量

顾露
- 粉丝: 19
- 资源: 313
 我的内容管理
展开
我的内容管理
展开







最新资源
- pawiis_pet_service
- misc.ka-开源
- rabbitmq 3.8.14版本可以用的延时插件
- EDSR(增强型深度超高分辨率)Matlab端口:EDSR(增强型深度超高分辨率)Matlab单图像超分辨率-matlab开发
- ICT-in-de-Wolken:ICT的信息库,位于沃尔肯(Wolken)
- valorant:圭亚那勇士
- FlutterCTipApp_03_实现滚动渐变的AppBar
- 媒体广告中的市场研究方法PPT
- MyFirstRep-Broadcast-Receiver-with-Vibrate-Alert-
- cursoAngular4:使用CodeSandbox创建
- SKIN_GCN:皮肤检测(使用GCN)
- grooming:美容网站 - Ignacio Prados
- constellation:适用于C ++的高性能线性代数库
- 元旦晚会策划案
- haxm-7.5.6.tar.gz
- nybble_core:使用Deployer创建的ARK.io区块链
