LEO空间物体ISAR成像:观察角与平面特性分析
115 浏览量
更新于2024-07-14
收藏 1.12MB PDF 举报
"这篇研究论文探讨了低地球轨道(LEO)空间物体的逆合成孔径雷达(ISAR)成像技术,特别是关注在成像过程中观察角和图像平面特征的变化。作者们通过扩展理想的转盘模型,来分析近圆形轨道物体的观测几何特性。他们提出了两种近似方法,一种是将空间物体的轨道视为相对于地球的标准弧,另一种则是忽略地球自转对观测的影响。这些方法用于计算像平面的法线角度和观察角度。"
正文:
在ISAR成像中,对于LEO卫星的精确成像是一个关键挑战,因为它们的运动轨迹复杂且受地球重力和自转的影响。这篇研究深入研究了这一问题,首先建立了一个扩展的理想转盘模型,这个模型能更好地模拟近圆形轨道物体的观测几何形状。这个模型对于理解和预测ISAR成像过程中的图像变化至关重要。
为了量化这些变化,研究者应用了两种不同的近似策略。第一种是假设在雷达观测期间,空间物体的轨道相对于地球保持标准弧形,这有助于简化计算。第二种近似忽略了地球自转的影响,尽管这可能会导致一定的误差,但在某些情况下可以简化问题,提供初步的理解。
接下来,研究者通过几何模型分析了不同姿态稳定方法下像平面法线的闭合形式解,并利用雷达视线(LOS)的共同约束条件,探讨了像平面的特性以及近圆形轨道物体的观察角。这种分析有助于理解ISAR成像过程中像面如何随时间变化,以及这些变化如何影响最终的成像质量。
进一步,研究者量化了ISAR成像中像面的变化,并确定了雷达LOS的旋转角速度。这一信息对于校准ISAR图像的跨范围方向至关重要,因为它确保了图像的正确对齐和聚焦。此外,他们还利用双站干涉仪技术进行三维成像重建,这是一种增强成像分辨率和深度感知的有效方法。
最后,通过仿真验证了三维干涉重建的结果,并计算了重建精度误差,这是评估该方法实际应用性能的关键步骤。这些仿真结果不仅证实了理论分析的准确性,也为未来改进ISAR成像技术提供了实证基础。
这项工作为理解和优化LEO空间物体的ISAR成像提供了重要的理论框架和实用工具,对于提高空间目标识别和跟踪的效率具有重要意义。通过精确掌握观察角和平面特征,可以为地球轨道上的空间物体提供更清晰、更准确的成像,这对于太空安全、监测和科学研究等领域具有深远影响。
The centre of the Earth o is the origin. The y-axis is in the
direction of the tangent velocity, and the x-axis is perpen-
dicular to the y-axis and points toward the object from
the Earth’s centre. The z-axis is defined according to the
right-hand rule.
2.1.3. Object-fixed coordinate system
The object-fixed coordinate system is the coordinate sys-
tem that is rigidly connected to the object. It is often uti-
lised to describe inherent feat ures of the object. The
analysis of the changes in the image plane must be per-
formed in the object-fixed coordinate system. In the initial
positioning orientation, we assume that the reference-orbit
coordinate system coincides with the object-fixed coordi-
nate system. In the absolute orientation, the object-fixed
coordinate system can be regarded as identical to the
satellite-based coordinate system based on the assumptions
that the orbital eccentricity is zero and neglecting the effects
of Earth’s rotation.
2.1.4. Reference radar coordinate system
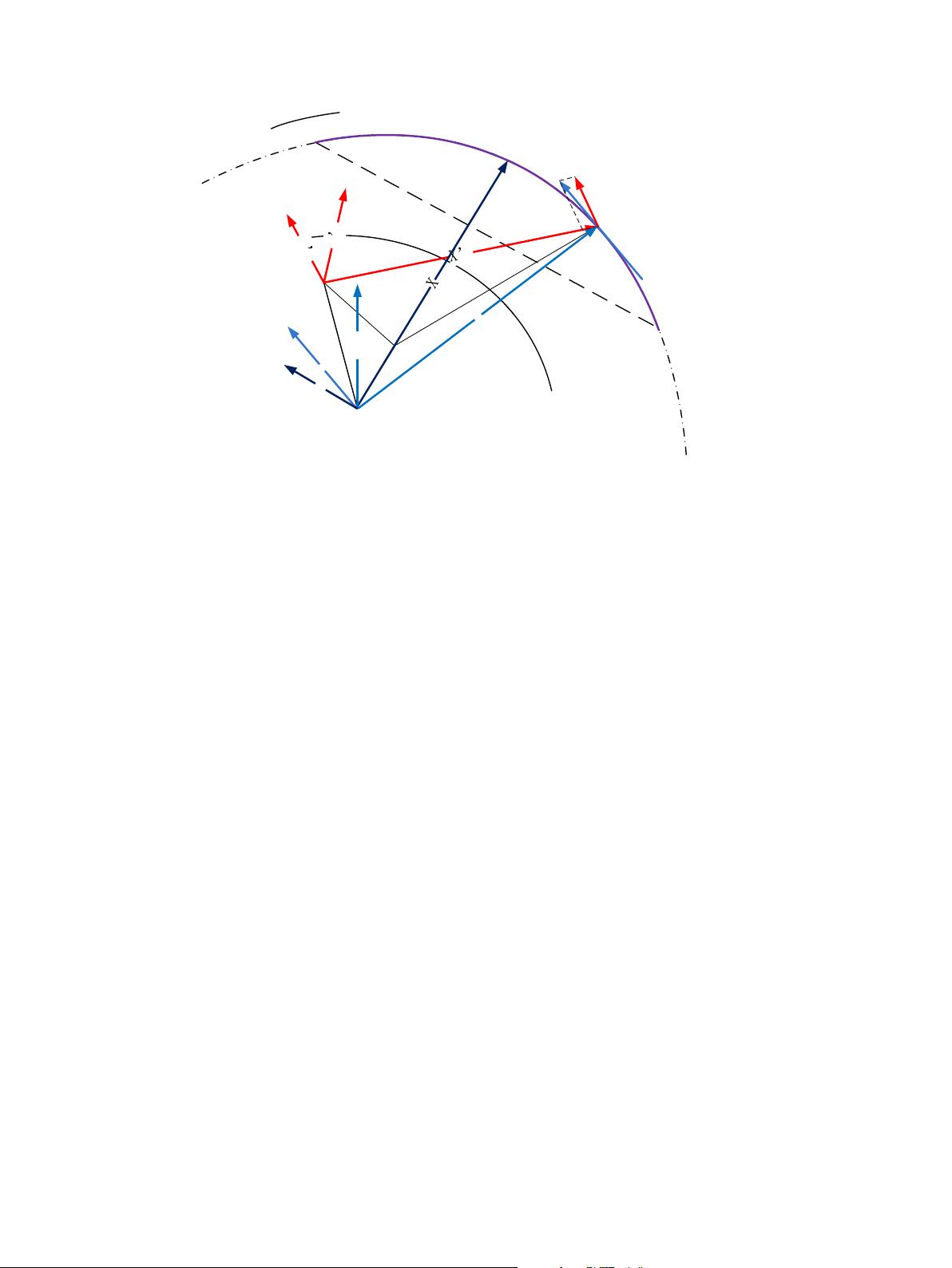
The reference radar coordinate system in Fig. 2, one
coordinate direction X
0
of which always coincides with
the LOS and another coordinate Y
0
of which always lies
in the plane spanned by the changing LOS, is marked in
red lines. The rotation axis Z
0
is then given by the cross pro-
duct of two LOS directions at tw o distinct time instances.
2.2. Definition of observation geometry
During the flight of many satellites, the three perpendic-
ular axes of the satellite must be controlled simultaneo usly
to prevent any axis from exceeding specified values for
rotation and swing. This method of stabilisation is called
three-axis attitude-stabilisation for satellites. Presently,
almost all satellites in LEO adopt the three-axis attitude-
stabilisation approach for attitude control because it is
applicable to satellites with multiple types of orbits with
various orientation requirements. This approach can also
be applied to other satellite processes, such as rendezvous,
docking, return and orbital transformation.
This study analyses two main three-axis attitude-
stabilisation methods for LEO space objects, which are
shown in Fig. 3. One stabilisation method keeps the axes
in the object-fixed coordinate system parallel to fixed vec-
tors in the inertial system; therefore, this method is called
inertial positioning, as shown in Fig. 3(a). The other stabil-
isation method called absolute orientation maintains one of
the axes in the object-fixed coordinate system pointing at
the centre of the earth, as shown in Fig. 3(b).
The geometric model for LEO space object ISAR
imaging based on these two attitudes (Katayama et al.,
1992; Ali et al., 1998), assuming that the orbital eccentricity
is zero and neglecting the effects of Earth’s rotation, is
shown in Fig. 4.
In Fig. 4, A is the position of the radar, O is the Earth’s
centre, R
e
is the radius of the Earth, and R
A
is the distance
between the radar station and the centre of the Earth. The
height of the object’s orbit is H , and R is the distance
between the object and the centre of the Earth. The horizon
of the radar station and the object’s orbit intersect in the
chord PQ. The orbit drawn in the solid red line is the vis-
ible orbit section when it ascends above the horizon of the
radar station. D is the apse of the visible orbit section, n is
half of the central angle of the visible orbit, and hðtÞ is the
central angle of the object’s apse. If E is set as the projec-
tion of the radar station in the orbit plane, the distance
between the radar station and the orbit plane is AE ¼ h.
Radar A
O center of the Earth
great circle of Earth’s
orbit plane
satellite’s orbit
D
E
T
Z(z)
Y
Z
y
Y
x
Satellite-based
coordinate system
Reference Orbit
coordinate system
Radar reference
coordinate system
Fig. 2. Schematic of the coordination systems.
32 J. Chen et al. / Advances in Space Research 58 (2016) 30–44
剩余14页未读,继续阅读
284 浏览量
2022-07-15 上传
2022-07-15 上传
2021-10-04 上传
2022-07-14 上传
2017-11-15 上传

weixin_38684633
- 粉丝: 4
- 资源: 927
 我的内容管理
展开
我的内容管理
展开







最新资源
- Aspose资源包:转PDF无水印学习工具
- Go语言控制台输入输出操作教程
- 红外遥控报警器原理及应用详解下载
- 控制卷筒纸侧面位置的先进装置技术解析
- 易语言加解密例程源码详解与实践
- SpringMVC客户管理系统:Hibernate与Bootstrap集成实践
- 深入理解JavaScript Set与WeakSet的使用
- 深入解析接收存储及发送装置的广播技术方法
- zyString模块1.0源码公开-易语言编程利器
- Android记分板UI设计:SimpleScoreboard的简洁与高效
- 量子网格列设置存储组件:开源解决方案
- 全面技术源码合集:CcVita Php Check v1.1
- 中军创易语言抢购软件:付款功能解析
- Python手动实现图像滤波教程
- MATLAB源代码实现基于DFT的量子传输分析
- 开源程序Hukoch.exe:简化食谱管理与导入功能
