并联柔性铰机器人静刚度模型与应用分析
需积分: 10 72 浏览量
更新于2024-09-05
收藏 230KB PDF 举报
《并联柔性铰机器人静刚度研究》是一篇发表在《清华大学学报(自然科学版)》1999年第39卷第8期的研究论文。该文章由李嘉、陈恳、董怡和张伯鹏四位作者合作完成,他们关注的是并联柔性铰机器人的关键特性——静刚度。这类机器人因其超精密定位能力在微操作领域有着广泛应用,特别是在采用压电陶瓷作为驱动器的场合。
论文的核心内容是通过对并联柔性铰机器人的结构进行深入分析,包括建立和转换一系列坐标系,以导出终端位姿的摄动位移与柔性铰微变形之间的映射关系。作者利用虚功原理提出了并联柔性铰机器人的静刚度模型,揭示了影响静刚度的关键因素,即不仅与传动刚度相关,还与柔性铰自身的刚度紧密相连。通过这个模型,研究人员可以研究静刚度特性,并据此优化机构设计,确保机器人在负载作用下的定位精度以及在特定范围内可控的终端输出力。
静刚度在机器人设计中的重要性不言而喻,它直接影响着机器人在外载荷下的响应,从而决定终端的变形大小和定位精度。研究者通过实例分析展示了如何在6自由度、PSS副的并联柔性铰机器人中评估和控制静刚度,这对于提高机器人的性能和适应性至关重要。
这篇论文提供了一个系统的方法来理解和优化并联柔性铰机器人的静刚度,对于设计者和工程师来说,它提供了一套实用的理论工具和实践指导,帮助他们在微操作领域的应用中提升精度和效率。
ISSN 100020054
CN 1122223N
清华大学学报
(
自然科学版
)
J T singhua U niv
(
Sci & Tech
)
,
1999 年 第 39 卷 第 8 期
1999,
Vol
. 39,
No
. 8
532
16~ 20
并联柔性铰机器人的静刚度研究
李 嘉, 陈 恳, 董 怡, 张伯鹏
清华大学 精密仪器与机械学系, 北京 100084
收稿日期: 1998209202
第一作者: 女, 1972 年生, 博士研究生
文 摘 并联柔性铰机器人是一类具有超精密定位能力的
微动操作手, 对这类采用非常规运动副的微动机器人, 其静
刚度在相当程度上决定了机器人的有载定位精度。该文首先
通过一系列坐标系的建立和转换, 导出终端位姿的摄动位移
与柔性铰微变形间的映射关系, 进而利用虚功原理提出并联
柔性铰机器人的静刚度模型, 显示出影响静刚度的主要因素
不仅与传动刚度有关还与柔性铰的刚度有关, 此外通过该模
型研究了静刚度特性, 其结果可用于指导机构优化设计。最
后, 以实例分析了并联柔性铰机器人的静刚度。
关键词 并联机器人; 微操作; 柔性铰; 静刚度
分类号
TP
242
以压电陶瓷为驱动器的并联柔性铰机器人被广
泛用于微操作领域
[1~ 4 ]
。设计这种机器人的机械结
构时, 静刚度是一个非常重要的设计准则, 它不仅和
外载大小直接决定了终端变形的大小, 对终端定位
精度有相当大的影响; 而且在一定终端变位范围
内, 使静刚度可控还可获得可控的终端输出力
[5, 6 ]
。
本文针对 6 自由度、
PSS
副的并联柔性铰机器人进
行了静刚度研究, 通过摄动位移间映射关系的分析,
在虚功原理的基础上, 建立了静刚度模型, 并利用静
刚度性能指标分析了工作空间中各点的刚度情况,
最后给出了一实例计算。
1 并联柔性铰机器人的静刚度分析
1. 1 并联柔性铰机器人摄动微位移分析
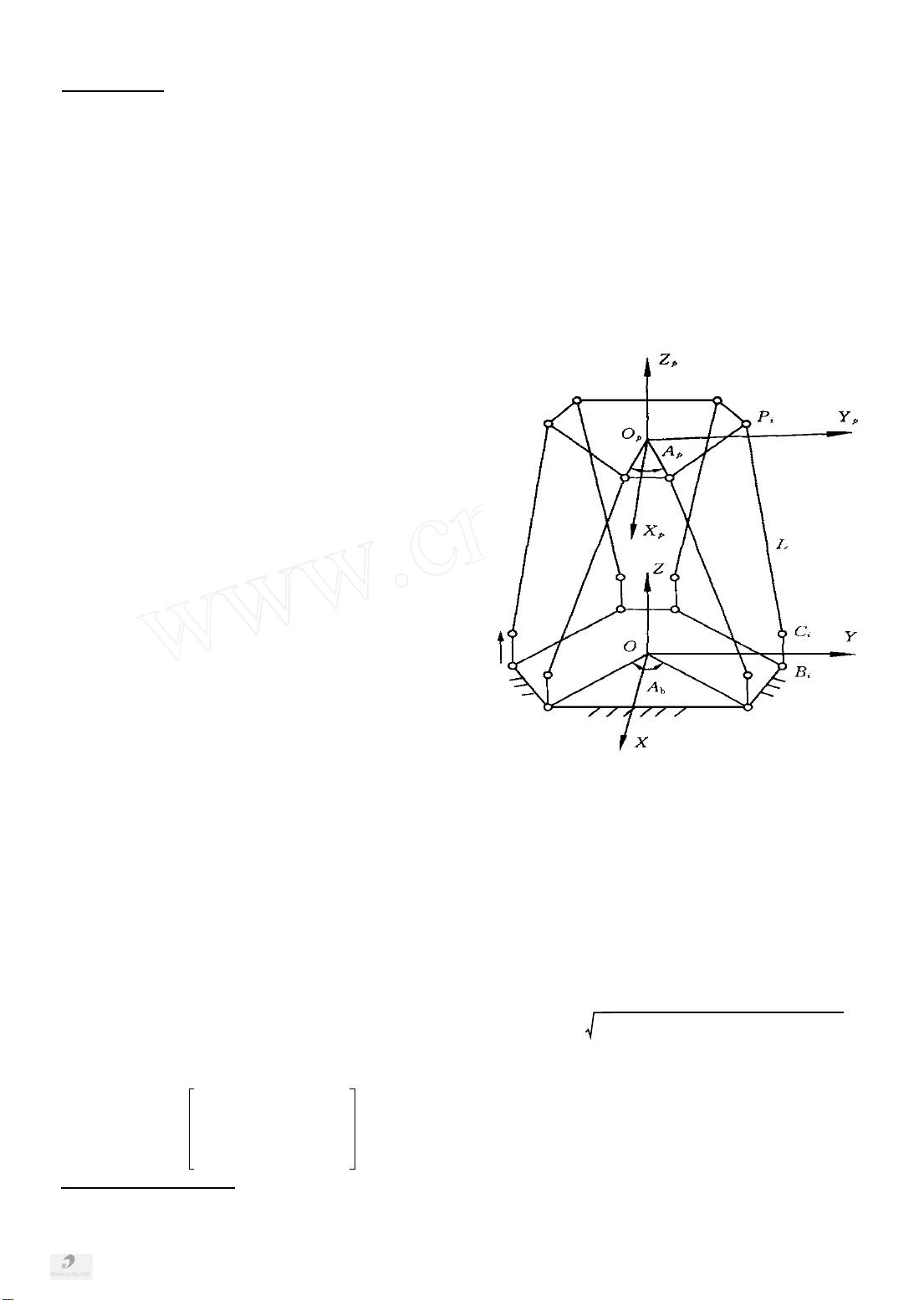
6 自由度、
PSS
副并联柔性铰机器人的结构示
意图如图 1 所示。按右手法则在基平台上选取参考
坐标系
OX Y Z
, 动坐标系
O pX p Y p Z p
与动平台相连,
则动坐标系相对参考坐标系的齐次变换矩阵为:
P
B
T =
1 - Χ Β x
Χ 1 - Α y
- Β Α 1 z
0 0 0 1
(
1
)
图 1 并联柔性铰机器人的结构示意图
式中:
x
,
y
,
z
—分别为动坐标系原点
O
P
相对参考
坐标系的坐标分量;
Α
,
Β
,
Χ
—分别为动坐标系绕参
考坐标系
X
,
Y
,
Z
轴的摄动角位移。 矢量
P
P i
=
[
p
′
ix
p
′
iy
p
′
iz
1 ]
T
表示
P i
点相对于动坐标系的坐
标, 则
P
i
点 相 对 参 考 坐 标 系 的 坐 标
B
P
i
=
[
p ix
p iy
p iz
1 ]
T
可用下式描述:
B
P
i
=
P
B
T
P
P
i
(
2
)
其逆运动学方程为
l
i
= p
iz
- L
2
-
(
p
ix
- c
ix
)
2
-
(
p
iy
- c
iy
)
2
i = 1, 2, …, 6
(
3
)
式中
B
C
i
= [
c
ix
c
iy
l
i
1 ]
T
为
C
i
点相对于参考坐
标系的坐标;
li
为驱动杆
B iCi
的长度。利用
(
1
) (
2
)
(
3
)
, 可方便地导出终端位姿的摄动位移与驱动摄动
位移间的关系为:
∃l = J ∃O
p
(
4
)
式中:
J
—机器人的雅可比矩阵,
© 1994-2006 China Academic Journal Electronic Publishing House. All rights reserved. http://www.cnki.net
下载后可阅读完整内容,剩余4页未读,立即下载
2021-08-13 上传
2019-09-20 上传
2021-08-13 上传
2021-08-14 上传
2021-08-14 上传
2019-10-11 上传
2019-09-26 上传
2021-09-17 上传
2021-08-13 上传

weixin_38744375
- 粉丝: 372
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java集合ArrayList实现字符串管理及效果展示
- 实现2D3D相机拾取射线的关键技术
- LiveLy-公寓管理门户:创新体验与技术实现
- 易语言打造的快捷禁止程序运行小工具
- Microgateway核心:实现配置和插件的主端口转发
- 掌握Java基本操作:增删查改入门代码详解
- Apache Tomcat 7.0.109 Windows版下载指南
- Qt实现文件系统浏览器界面设计与功能开发
- ReactJS新手实验:搭建与运行教程
- 探索生成艺术:几个月创意Processing实验
- Django框架下Cisco IOx平台实战开发案例源码解析
- 在Linux环境下配置Java版VTK开发环境
- 29街网上城市公司网站系统v1.0:企业建站全面解决方案
- WordPress CMB2插件的Suggest字段类型使用教程
- TCP协议实现的Java桌面聊天客户端应用
- ANR-WatchDog: 检测Android应用无响应并报告异常
