MATLAB Robotics Toolbox 10.4:机械臂仿真与RVC2教程
需积分: 32 16 浏览量
更新于2024-07-15
收藏 3.86MB PDF 举报
《机器人工具箱手册10.4版》是MATLAB环境下的一个强大的工具,专为机械臂和移动机器人仿真设计。本教材是RoboticsToolbox的第十个主要发布,标志着该工具箱开发的持续超过二十五年,以及相当高的成熟度。它与2017年6月出版的《机器人、视觉与控制》第二版(RVC2)相呼应。
此版本的MATLAB RoboticsToolbox提供了丰富的功能,覆盖了机器人研究和模拟的多个关键领域。对于机械臂类型的机器人,用户可以利用一系列功能进行包括运动学、轨迹生成、动力学分析以及控制策略的设计。这些功能有助于深入理解并模拟复杂的工作流程,如关节运动、力控制和路径规划。
另一方面,移动机器人部分的功能更加侧重于移动性,如路径规划、基于动力学的路径规划、定位(localization)、地图构建以及同步定位和建图(Simultaneous Localization and Mapping, SLAM)。这些工具箱中的类结构设计使得模型表示更加直观和模块化,例如,机器人、传感器和地图都可以作为独立的对象来处理,便于用户在Simulink环境中构建和集成。
此外,用户可以通过讨论组http://groups.google.com.au/group/robotics-tool-box寻求帮助和交流经验,共同探讨解决机器人技术中的各种问题。版权信息表明,所有内容由Peter Corke创作,他同时也维护着Toolbox的官方网站http://www.petercorke.com/robot,提供进一步的学习资源和更新信息。
《机器人工具箱手册10.4版》是学习、教学和实践机器人系统设计的重要参考资料,无论是初学者还是高级研究人员,都能从中受益,实现从理论到实际应用的无缝连接。通过利用这个工具箱,用户可以在MATLAB的平台上实现高效、精确的机器人仿真和控制,推动科研和工业领域的技术创新。
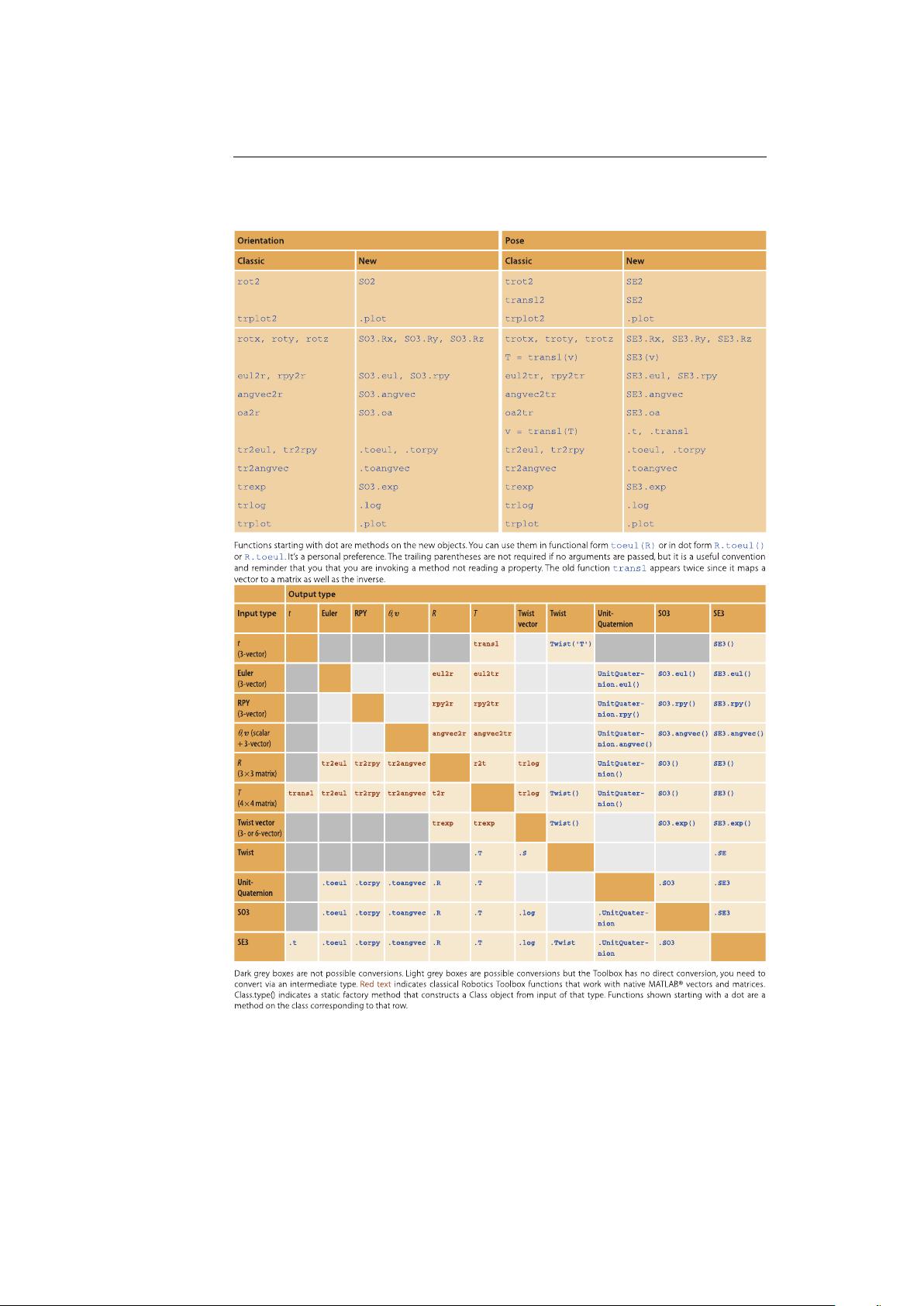
1.1. CHANGES IN RTB 10 CHAPTER 1. INTRODUCTION
Figure 1.1: (top) new and classic methods for representing orientation and pose, (bot-
tom) functions and methods to convert between representations. Reproduced from
“Robotics, Vision & Control, second edition, 2017”
Robotics Toolbox 10.4 for MATLAB
®
16 Copyright ©Peter Corke 2020


剩余461页未读,继续阅读
2021-12-29 上传
2021-12-29 上传
2019-12-27 上传
2019-08-24 上传
2020-05-01 上传

-superhero
- 粉丝: 569
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 基于Python和Opencv的车牌识别系统实现
- 我的代码小部件库:统计、MySQL操作与树结构功能
- React初学者入门指南:快速构建并部署你的第一个应用
- Oddish:夜潜CSGO皮肤,智能爬虫技术解析
- 利用REST HaProxy实现haproxy.cfg配置的HTTP接口化
- LeetCode用例构造实践:CMake和GoogleTest的应用
- 快速搭建vulhub靶场:简化docker-compose与vulhub-master下载
- 天秤座术语表:glossariolibras项目安装与使用指南
- 从Vercel到Firebase的全栈Amazon克隆项目指南
- ANU PK大楼Studio 1的3D声效和Ambisonic技术体验
- C#实现的鼠标事件功能演示
- 掌握DP-10:LeetCode超级掉蛋与爆破气球
- C与SDL开发的游戏如何编译至WebAssembly平台
- CastorDOC开源应用程序:文档管理功能与Alfresco集成
- LeetCode用例构造与计算机科学基础:数据结构与设计模式
- 通过travis-nightly-builder实现自动化API与Rake任务构建
