MG996R舵机控制原理与单片机实现
"MG996R舵机控制涉及单片机的PWM信号调制,用于实现精确的角度伺服。这种舵机常用于机器人和航模中,通过改变PWM信号的占空比来控制舵机的位置。单片机控制舵机的优势在于其低成本、高精度和灵活性。然而,由于电源噪声和其他信号的影响,滤波电路的精度很难满足5mV的控制电压变化要求。因此,单片机成为更优的控制单元,能够产生微秒级别的脉冲宽度变化,提高舵机转角精度。在单片机控制系统中,通过设定20ms的PWM周期,并调整占空比来控制舵机的转动角度。对于多个舵机的控制,可能需要更复杂的软件策略。"
MG996R舵机是一种广泛应用在机器人和微机电系统中的位置伺服驱动器,它的主要特点是可以通过单片机进行精确控制。舵机通常包含三个连接线:红色为+5V电源,棕色为接地(GND),黄色线则传输控制信号。这种控制信号是PWM(脉冲宽度调制)信号,其占空比决定了舵机转动的角度。
舵机的工作原理是基于电压比较和反馈机制。内部有一个基准电路产生20ms周期、1.5ms宽度的基准信号。这个基准信号与输入的控制信号(直流偏置电压)进行比较,根据电压差决定电机的正反转。电机通过减速齿轮组驱动电位器,当电位器的电压与基准信号相等时,电机停止转动,从而使舵机保持特定的角度。
单片机控制舵机的优势在于其灵活性和精度。相比于FPGA或模拟电路,单片机可以更方便地产生PWM信号,同时减少硬件电路和软件开销。为了产生20ms的PWM周期,单片机通常设置一个定时器中断,通过短定时中断和长定时中断的组合来调整脉冲宽度,从而改变舵机的转动角度。
在实际应用中,由于电源噪声和其他电子设备的干扰,简单的滤波电路可能无法提供足够的精度来稳定舵机。因此,单片机系统的数字控制成为更好的选择,因为它们对硬件计数的依赖使得控制信号更少受到外界干扰,提高了整个系统的可靠性。
总结来说,MG996R舵机的控制涉及到单片机的PWM信号生成和处理,通过精确控制脉冲宽度来实现角度伺服。单片机系统能有效克服滤波电路精度不足的问题,提供高精度和可靠的舵机控制。对于多舵机系统,可能需要更复杂的软件设计来同步和独立控制每个舵机,以满足不同应用场景的需求。
MG996R 舵机控制方法
红:+5v,棕:GND,黄:信号
基于单片机的舵机控制方法具有简单、精度高、成本低、体积小的特点,并可根据不同的舵机数量加
以灵活应用。
在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。舵机可以在微机电系统和航模中作为
基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。
舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。其工作原理是:
控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为
20ms,宽度为 1.5ms 的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最
后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电
位器旋转,使得电压差为 0,电机停止转动。
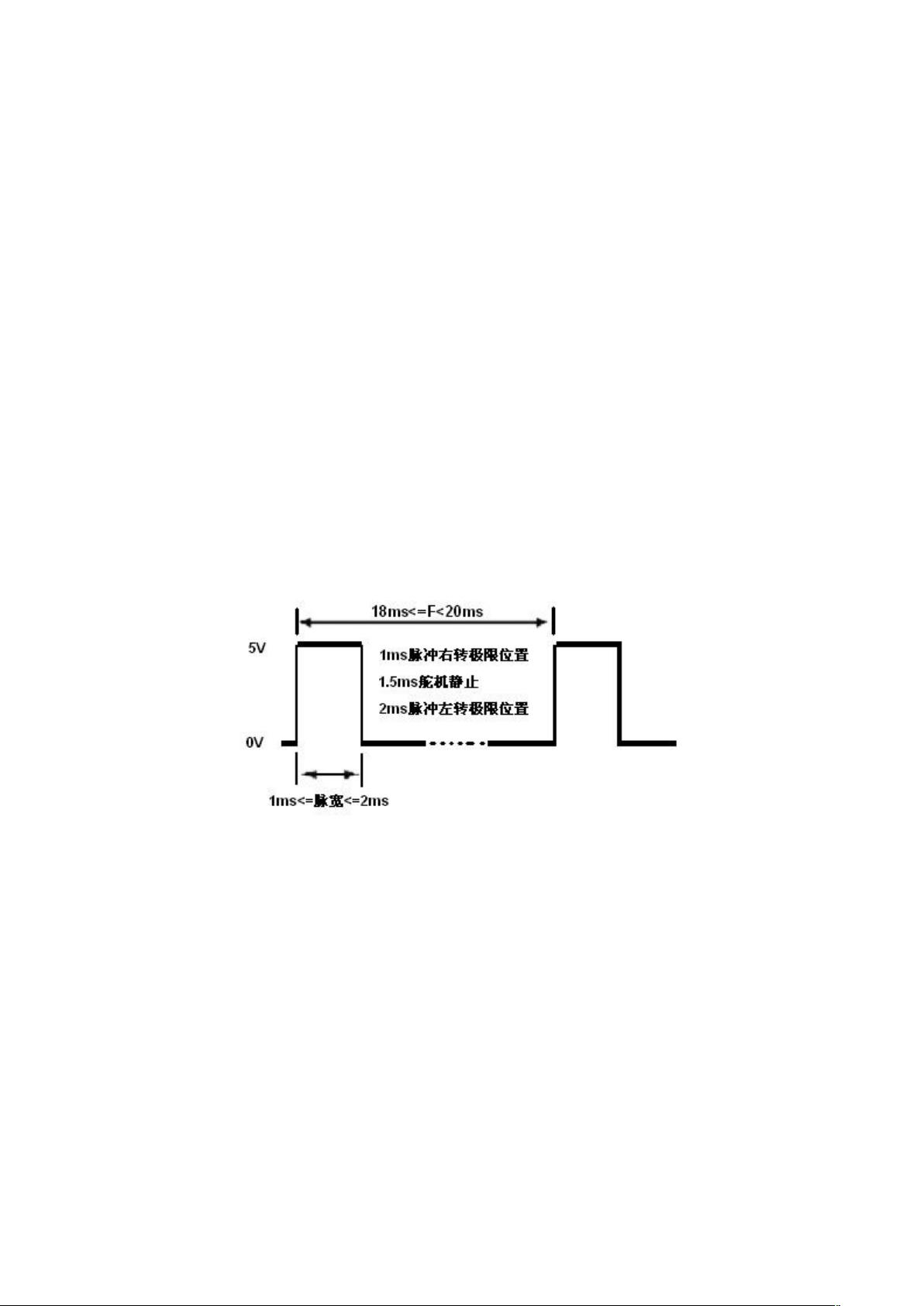
图 1
舵机的控
制要求
舵机的控制信
号是 PWM 信号,
利用占空比的变
化改变舵机的位置。一般舵机的控制要求如图 1 所示。
单片机实现舵机转角控制
可以使用 FPGA、模拟电路、单片机来产生舵机的控制信号,但 FPGA 成本高且电路复杂。对于脉宽调
制信号的脉宽变换,常用的一种方法是采用调制信号获取有源滤波后的直流电压,但是需要 50Hz(周期是
20ms)的信号,这对运放器件的选择有较高要求,从电路体积和功耗考虑也不易采用。5mV 以上的控制
电压的变化就会引起舵机的抖动,对于机载的测控系统而言,电源和其他器件的信号噪声都远大于
5mV,所以滤波电路的精度难以达到舵机的控制精度要求。
也可以用单片机作为舵机的控制单元,使 PWM 信号的脉冲宽度实现微秒级的变化,从而提高舵机的转
角精度。单片机完成控制算法,再将计算结果转化为 PWM 信号输出到舵机,由于单片机系统是一个数字
系统,其控制信号的变化完全依靠硬件计数,所以受外界干扰较小,整个系统工作可靠。
单片机系统实现对舵机输出转角的控制,必须首先完成两个任务:首先是产生基本的 PWM 周期信号,
本设计是产生 20ms 的周期信号;其次是脉宽的调整,即单片机模拟 PWM 信号的输出,并且调整占空比。
下载后可阅读完整内容,剩余3页未读,立即下载
1854 浏览量
333 浏览量
319 浏览量
8518 浏览量
929 浏览量
381 浏览量

wenshaohua
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- WPF应用中异步调用Web API的HttpClient使用教程
- 掌握AE插件Plexus制作酷炫三维粒子效果
- 深入探索Android 5.0中的蓝牙源码解析
- 提升效率:自动补全CRX插件解析与应用
- AngularJS应用程序开发快速启动指南
- ThinkPHP5.0实现PHP登录超时检测功能类教程
- Java语言下的jlox解析器项目概览
- 视频哈希值批量修改工具的介绍与使用
- Android中ListView条目的动态添加与删除
- QT结合PCAN库开发的上位机应用实例
- 如何安装mysql-proxy所需的工具包
- MSB调查源代码解析及工具使用指南
- 打造响应式jQuery左侧手风琴菜单教程
- MSP430F149实现LCD1602显示屏的三线串口控制
- Security+学习资料分享:我的创建与使用经验
- Java JDK 1.6 API 中英文开发文档完整版
