CAN通信卡在Linux下的驱动程序设计与实现
106 浏览量
更新于2024-08-30
1
收藏 155KB PDF 举报
"CAN通信卡的Linux设备驱动程序结构
Linux系统内核通过设备驱动程序与外围设备进行交互,设备驱动程序是Linux内核的一部分,它包括一组数据结构和函数,这些元素共同负责管理和控制硬件设备。在CAN通信卡的上下文中,驱动程序扮演着连接计算机和CAN网络的关键角色。它抽象出设备的具体细节,使上层应用程序能够通过标准的系统调用(如read和write)与设备交互,而无需关心硬件的具体操作。
在Linux中,设备通常被分类为字符设备和块设备。对于CAN通信卡,由于其传输的是有序的数据帧而非随机访问的数据块,因此通常被定义为字符设备。字符设备驱动程序主要处理连续的数据流,适合于需要顺序传输数据的场合。CAN驱动会提供一个设备文件,用户空间的应用可以通过打开、读取和写入这个设备文件来发送和接收CAN消息。
2CAN通信卡驱动程序的软件框架
CAN通信卡的Linux驱动程序通常包含以下几个关键部分:
- 设备注册:驱动程序需要在系统启动时向内核注册,声明它所支持的设备类型和功能。这通常通过调用register_chrdev()函数完成。
- 数据缓冲区管理:为了提高通信效率,驱动程序通常会维护一个或多个缓冲区,用于暂存从CAN网络接收到的数据或等待发送的数据。合理的缓冲区管理可以避免数据丢失并优化系统性能。
- 中断处理程序:当CAN控制器检测到新的CAN消息时,它会产生一个中断通知CPU。中断处理程序是响应这些中断的地方,它的设计至关重要,因为它需要快速有效地处理中断,同时避免阻塞其他重要的系统任务。
- 设备I/O操作:驱动程序应提供读写操作,使得用户空间程序可以通过系统调用与设备交互。write操作用于发送CAN消息,而read操作则用于接收消息。
- 设备打开和关闭:驱动程序还需要处理设备的打开和关闭事件,确保在设备不再使用时释放资源。
3加入Linux系统内核
将CAN驱动程序整合到Linux内核涉及到编译和配置过程。首先,需要将驱动程序的源代码添加到内核源码树中,然后在配置阶段启用相应的模块选项。最后,通过make和make install命令重新编译和安装内核,使驱动程序成为系统的一部分。
4提高通信效率和能力
为了优化CAN通信,驱动程序可以采用异步I/O模型,例如使用中断处理和底半部(bottom half)机制,这样可以减少CPU的占用并提高响应速度。另外,还可以利用DMA(Direct Memory Access)技术,让硬件直接处理数据传输,减轻CPU负担。
5结论
设计和实现CAN通信卡的Linux设备驱动程序是一项复杂但至关重要的任务,它需要对Linux内核、设备驱动原理以及CAN协议有深入的理解。通过精心设计的驱动程序,可以在Linux环境中充分发挥CAN网络的优势,服务于各种工业自动化应用。开发者必须考虑到性能、可靠性以及与其他系统组件的兼容性,以确保驱动程序在实际环境中的高效运行。"
论实现论实现CAN通信卡通信卡Linux设备驱动程序的设计设备驱动程序的设计
介绍了Linux下设备驱动程序的结构,描述了CAN通信卡设备驱动程序的软件框架以及如何将CAN设备驱动程序
加入到Linux系统内核中。讨论了具体实现中为了提高通信效率和通信能力,改进设备驱动程序的缓冲区管理以
及利用Linux的特点合理设计中断处理程序。 目前,许多工业现场如电力系统、化工系统等大量使用控制器
局部网(CAN-Controller Area Network)现场总线网络,CAN通信卡作为计算机的外设将计算机接入CAN网
络。市场上有不少CAN通信卡,但基本上都不带Linux驱动程序,当需要在Linux下使用CAN通信卡设备时,需
自己开发Linux的驱动程序。开发Linux驱动
介绍了Linux下设备驱动程序的结构,描述了CAN通信卡设备驱动程序的软件框架以及如何将CAN设备驱动程序加入到
Linux系统内核中。讨论了具体实现中为了提高通信效率和通信能力,改进设备驱动程序的缓冲区管理以及利用Linux的特点合
理设计中断处理程序。
目前,许多工业现场如电力系统、化工系统等大量使用控制器局部网(CAN-Controller Area Network)现场总线网
络,CAN通信卡作为计算机的外设将计算机接入CAN网络。市场上有不少CAN通信卡,但基本上都不带Linux驱动程序,当需
要在Linux下使用CAN通信卡设备时,需自己开发Linux的驱动程序。开发Linux驱动程序不但要求程序员要非常熟悉Linux系
统,而且要熟悉Linux驱动程序开发的规范。本文将详细介绍CAN通信卡的Linux驱动设备程序的设计和实现。
1 CAN通信卡的通信卡的Linux设备驱动程序结构设备驱动程序结构
Linux 系统内核通过设备驱动程序与外围设备进行交互,设备驱动程序是Linux内核的一部分,它是一组数据结构和函数,
这些数据结构和函数通过定义的接口控制一个或多个设备。对应用程序而言,设备驱动程序隐藏了设备的具体细节,对各种不
同设备提供一致的接口,一般来说是把设备射为一个特殊的设备文件,用户程序可以象对普通文件一样对此设备文件进行操
作。
Linux 将每个设备看作一个文件,即可以像对待文件那样使用read、write等系统调用进行读写。Linux的设备文件分为两
类:一是字符设备,只能对该类设备进行顺序读写,对外提供字节流方式的操作;二是块设备,可以对该类设备进行随机访
问,一般是磁盘设备等大容量存储设备。CAN通信卡设备属于字符型设备。
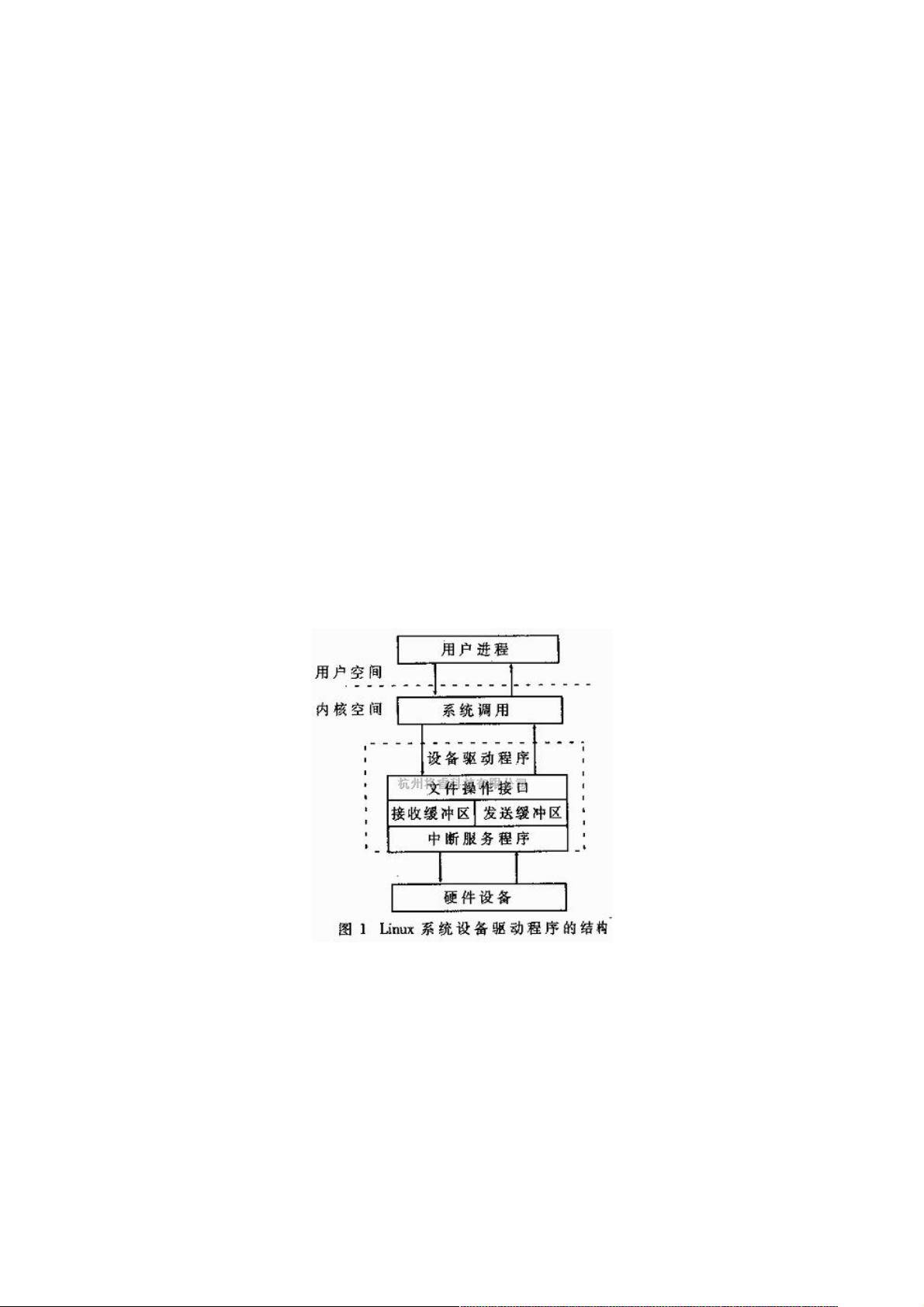
对设备的访问是由设备驱动程序提供的。Linux的设备驱动程序可以用模块的方式加载入内核,设备驱动程序与Linux系统
的关系如图1所示。
1.1 CAN通信卡设备的特点通信卡设备的特点
控制器局部网(CAN)属于现场总线的范畴,它是一种有效支持分布式控制或实时控制的串行通信网络。由于其性能优
异、价格低兼,很快被推广到工业测控现场。
CAN 通信卡硬件实现CAN定义的物理层和数据链路层功能,收发报文中数据长度为0~8个字节,有2032个报文标识符。
工作时通过报文标识符确定总线访问优先权,高优先级报文具有低延迟时间,数据传送速率可编程(最高为1Mbps)。发送期
间若丢二氧化碳仲裁或由于出错而破坏的报文可自动重发。具有成组和广播报文功能。
当CAN通信卡接收到一个报文时,数据保存在 CAN通信卡上的接收缓存器中,并产生一接收中断。当一个报文被成功发
关垢,发送缓冲器可再次被访问,产生一个发送中断信号。CAN通信卡发送报文,将数据送入CAN通信卡上的发送缓存器
中,CAN通信卡将数据串行化发到CAN总线上。
1.2 CAN通信卡设备驱动程序的任务通信卡设备驱动程序的任务
由于CAN一帧的数据长度最大为8个字节,可以用多帧的Hilon A协议来使CAN传输数据任意长。CAN通信卡驱动程序主
要完成按照Hilon A协议解包接收和打包发送任务,并要对接收的多帧进行管理。
下载后可阅读完整内容,剩余3页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2020-12-03 上传
2021-09-07 上传
2022-11-30 上传
2012-11-21 上传
2021-09-06 上传
2021-05-23 上传

weixin_38650951
- 粉丝: 5
- 资源: 927
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
