ROS与嵌入式系统:实现实时通信的多样方法
本PPT主要探讨了将Robot Operating System (ROS)应用于嵌入式系统的各种方法和挑战。演讲者Morgan Quigley来自开源机器人基金会,强调了在日益多样化的嵌入式系统中整合ROS的必要性,因为几乎所有的机器人项目都涉及嵌入式系统,如激光雷达、摄像头、电机和无线通信等。
ROS(Robot Operating System)作为一种强大的分布式操作系统,最初设计用于处理复杂的机器人软件架构,它在工业控制、自动化和物联网等领域有广泛应用。然而,传统的PC架构并不总是适合嵌入式环境,这些环境通常追求低成本、小型化、低功耗以及实时性能。因此,将ROS移植到嵌入式系统时,需要考虑多种因素:
1. **适应不同系统类型**:由于嵌入式设备的多样性,包括x86、mini-ITX、PC/104、ARM架构(如Android、Raspberry Pi、BeagleBone等),甚至专门针对微控制器设计的平台(如Gumstix、mbed、STM32等),选择适合的ROS主机和实时运行环境至关重要。有些设备允许对固件进行一定程度的控制,而有些则不然,这影响了ROS的集成方式。
2. **实时性与非实时性需求**:在嵌入式环境中,确保实时性是关键,尤其是对于处理传感器数据或执行即时动作的系统。ROS的设计允许将实时任务与非实时任务分离,使得实时部分能在嵌套的实时操作系统中独立运行,同时利用ROS的通信框架协调不同功能。
3. **硬件与软件的融合**:介绍的PPT可能详细讨论了如何在嵌入式系统上实现ROS节点,包括硬件抽象层(HAL)、中间件的优化、以及如何调整ROS架构以适应有限的资源。例如,使用轻量级版本的ROS,如ROS 2 Foxy Mavlink,或者定制化的ROS堆栈,以便在资源受限的平台上高效运行。
4. **市场趋势**:嵌入式市场的发展速度超过了桌面电脑,这推动了对简化ROS在嵌入式应用中的集成的需求。随着技术的进步,越来越多的计算能力可以集成到嵌入式系统中,使得ROS在这些设备上的部署成为可能。
5. **案例研究与最佳实践**:PPT可能还提供了几个实际案例,展示了在各种嵌入式环境中成功运用ROS的策略,以及遇到的挑战和解决方案。这些案例可以帮助开发者理解如何根据具体的应用场景选择最合适的ROS集成方法。
这份PPT提供了深入理解如何将ROS应用于嵌入式系统的宝贵资源,无论你是嵌入式系统开发者、机器人工程师还是研究者,都能从中获益于理解和优化ROS在不同硬件平台上的部署和性能优化。
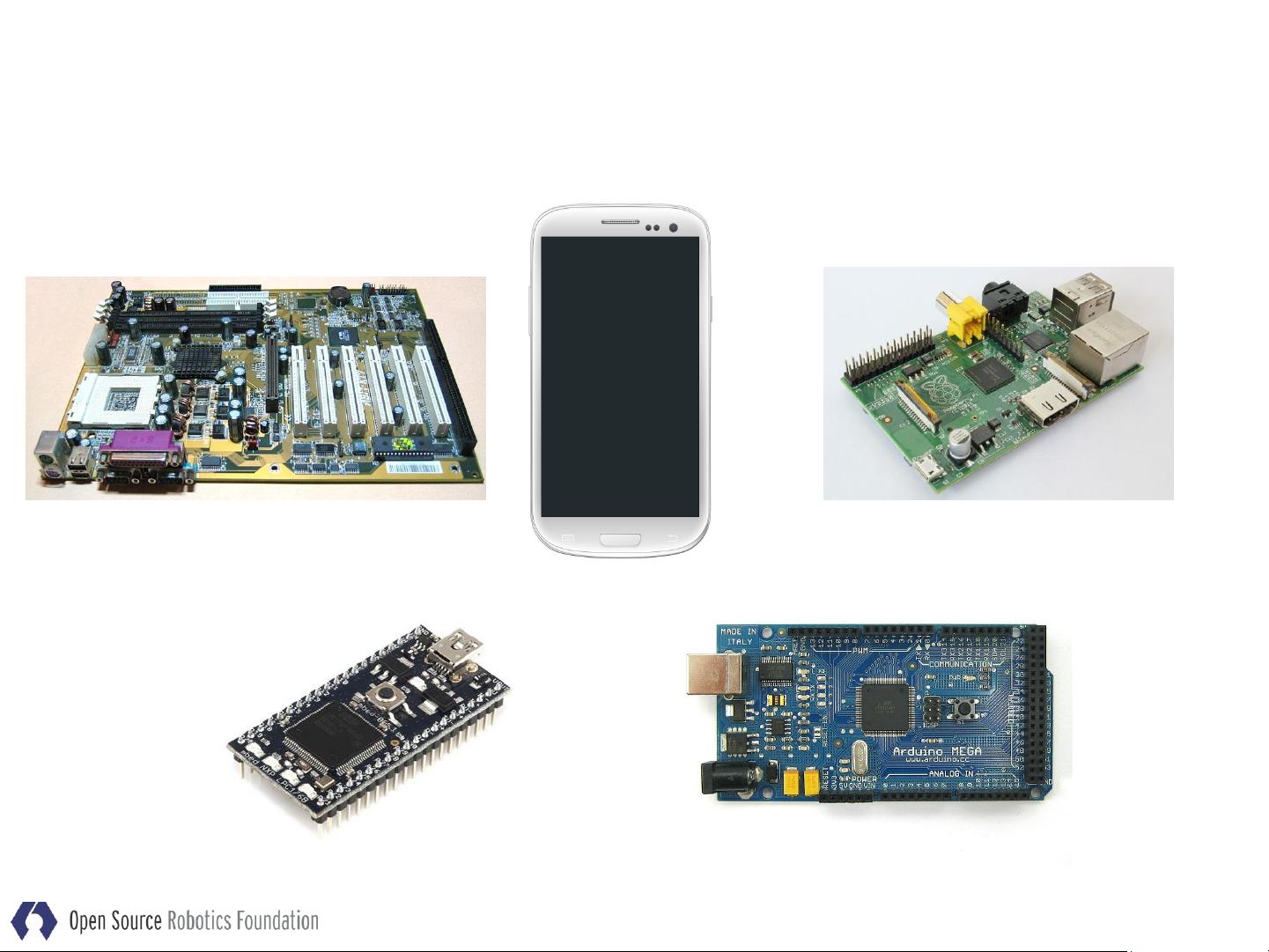
Huge Range of Embedded Systems
Images: Wikipedia
剩余15页未读,继续阅读
2018-07-17 上传
2020-07-30 上传
2023-10-20 上传
2017-12-14 上传
2018-04-12 上传
2024-09-26 上传

raymond_kwan
- 粉丝: 157
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 构建基于Django和Stripe的SaaS应用教程
- Symfony2框架打造的RESTful问答系统icare-server
- 蓝桥杯Python试题解析与答案题库
- Go语言实现NWA到WAV文件格式转换工具
- 基于Django的医患管理系统应用
- Jenkins工作流插件开发指南:支持Workflow Python模块
- Java红酒网站项目源码解析与系统开源介绍
- Underworld Exporter资产定义文件详解
- Java版Crash Bandicoot资源库:逆向工程与源码分享
- Spring Boot Starter 自动IP计数功能实现指南
- 我的世界牛顿物理学模组深入解析
- STM32单片机工程创建详解与模板应用
- GDG堪萨斯城代码实验室:离子与火力基地示例应用
- Android Capstone项目:实现Potlatch服务器与OAuth2.0认证
- Cbit类:简化计算封装与异步任务处理
- Java8兼容的FullContact API Java客户端库介绍
