"BOSCH CAN 规范 2.0中文翻译文件"
需积分: 5 114 浏览量
更新于2024-01-31
收藏 444KB PDF 举报
CAN总线是一种用于在汽车等设备中进行控制和通信的现代通信协议。本文翻译了"CAN2_0标准翻译.pdf",该文档由长城汽车有限公司电子部门(PVPD Electric and Electronics Dept. CHERY AUTOMOBILE CO.,LTD.)编制,并遵循着BOSCH CAN 规范 2.0的标准。CAN总线协议已成为现代汽车行业中的主流通信协议,也被广泛应用在其他行业的控制系统中。
CAN总线协议的引言指出,随着串行通讯在各个应用领域的普及,CAN总线作为一种串行通讯协议,得到了广泛的应用。CAN总线协议的特点包括:基于事件驱动的传输方式、支持多主机系统、具有较高的通信可靠性、支持实时控制等。这些特点使得CAN总线协议得以广泛应用于汽车电子控制系统、工业自动化控制系统等各种领域。
CAN总线协议的基本原理是通过差分信号传输和消息优先级来实现多个模块之间的通信。CAN总线协议的数据传输速率在1Mbps到1Gbps之间不等,具有较高的灵活性。
CAN总线协议的具体内容包括:消息格式、错误处理、网络管理、时钟同步、物理层特性等。其中,消息格式是CAN总线协议的核心部分,它包括标识符、数据域、CRC校验等内容,用于实现消息的识别和完整性检测。错误处理部分包括错误信号的检测和恢复机制,以保证通信的可靠性。
对于CAN总线协议的实现,需要考虑多个因素,包括芯片选型、线缆布线、网络拓扑结构、网络管理等。在实际应用中,还需要考虑系统的可靠性、实时性、安全性等方面的要求,以确保CAN总线系统能够稳定运行,并满足实际应用的需求。
总的来说,CAN总线协议是一种广泛应用于现代汽车行业和其他领域的通信协议,它具有高性能、高可靠性和灵活性的特点,可以满足复杂控制系统的通信需求。本文翻译的"CAN2_0标准翻译.pdf"提供了对CAN总线协议的详细介绍和规范,有助于读者更好地理解和应用CAN总线协议。CAN总线协议的不断完善和发展将进一步推动其在各个领域的应用,为现代控制系统的发展和智能化进程提供更加可靠和高效的通信支持。
PVPD
Electric and Electronics Dept.
CHERY AUTOMOBILE CO.,LTD.
Page n. 6
CANBUS
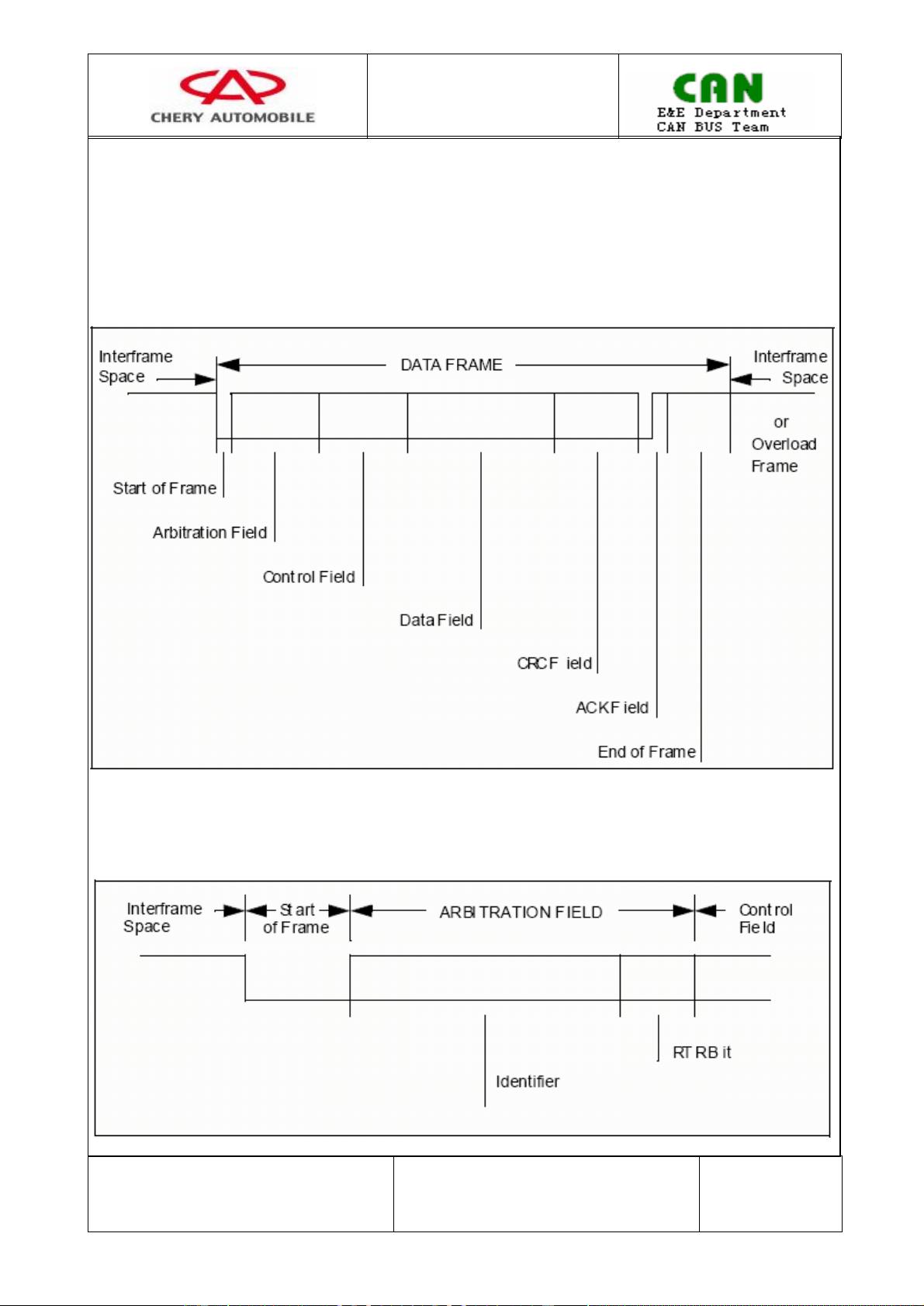
3.1.1 数据帧
数据帧由7 个不同的位场组成:
帧起始、仲裁场、控制场、数据场、CRC 场、应答场、帧结尾。数据场的长度可以为0。
帧起始
它标志数据帧和远程帧的起始,由一个单独的“显性”位组成。
只在总线空闲(参见“总线空闲”)时,才允许站开始发送(信号)。所有的站必须同步于首先开始
发送信息的站的帧起始前沿(参见“硬同步”)。
仲裁场
仲裁场包括识别符和远程发送请求位(RTR)。
识别符:识别符的长度为11 位。这些位的发送顺序是从ID-10 到ID-0。最低位是ID-0。最高的7 位(ID-10 到ID-4)必须不
能全是“隐性”。
RTR 位:该位在数据帧里必须为“显性”,而在远程帧里必须为“隐性”。
剩余31页未读,继续阅读
233 浏览量
575 浏览量
167 浏览量
325 浏览量
2021-11-26 上传
487 浏览量

yuellee
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







