STM32F407驱动的大学生智能车模直立行走竞赛设计详解
需积分: 10 83 浏览量
更新于2024-07-19
收藏 6.17MB PDF 举报
"本篇文章是第七届全国大学生'飞思卡尔'杯智能汽车竞赛电磁组的直立行车参考设计方案,针对STM32F407微控制器开发,主要聚焦于直立控制、速度控制和方向控制。文章首先介绍了竞赛背景和目的,强调通过直立行走任务的设定来提升学生的创新和实践能力。
在原理篇中,作者详细解释了车模直立行走任务的分解,包括如何利用C型车模的双后轮驱动实现直立行走,以及速度、方向控制的关键要素。通过阐述车模倾角测量的重要性,为后续的控制算法设计提供了基础。设计者还绘制了车模直立行走控制算法的总图,直观展示各部分之间的交互关系。
电路设计篇涵盖了整体电路框图、DSC(数字信号处理器)与单片机最小系统的配置、倾角传感器电路、电机驱动电路、速度传感器和电磁线检测电路的设计。这些电路的构建对于实现精确的控制至关重要。
机械设计部分涉及车模的简化改装,如何安装传感器以及应注意的事项,确保硬件的稳定性和精度。软件编写与调试篇则讨论了软件的功能结构,资源配置,控制算法的实现,以及程序调试和参数整定的过程。最后,作者强调了方案的实用性,并提供了一份可供参赛队伍参考的设计方案,以及经过验证的测试视频。
这篇文章提供了一个详实的指南,帮助参赛者理解和实现基于STM32F407的智能车模直立行走控制系统,旨在促进大学生在实际操作中提升技术能力,同时兼顾了理论与实践的结合。"
9
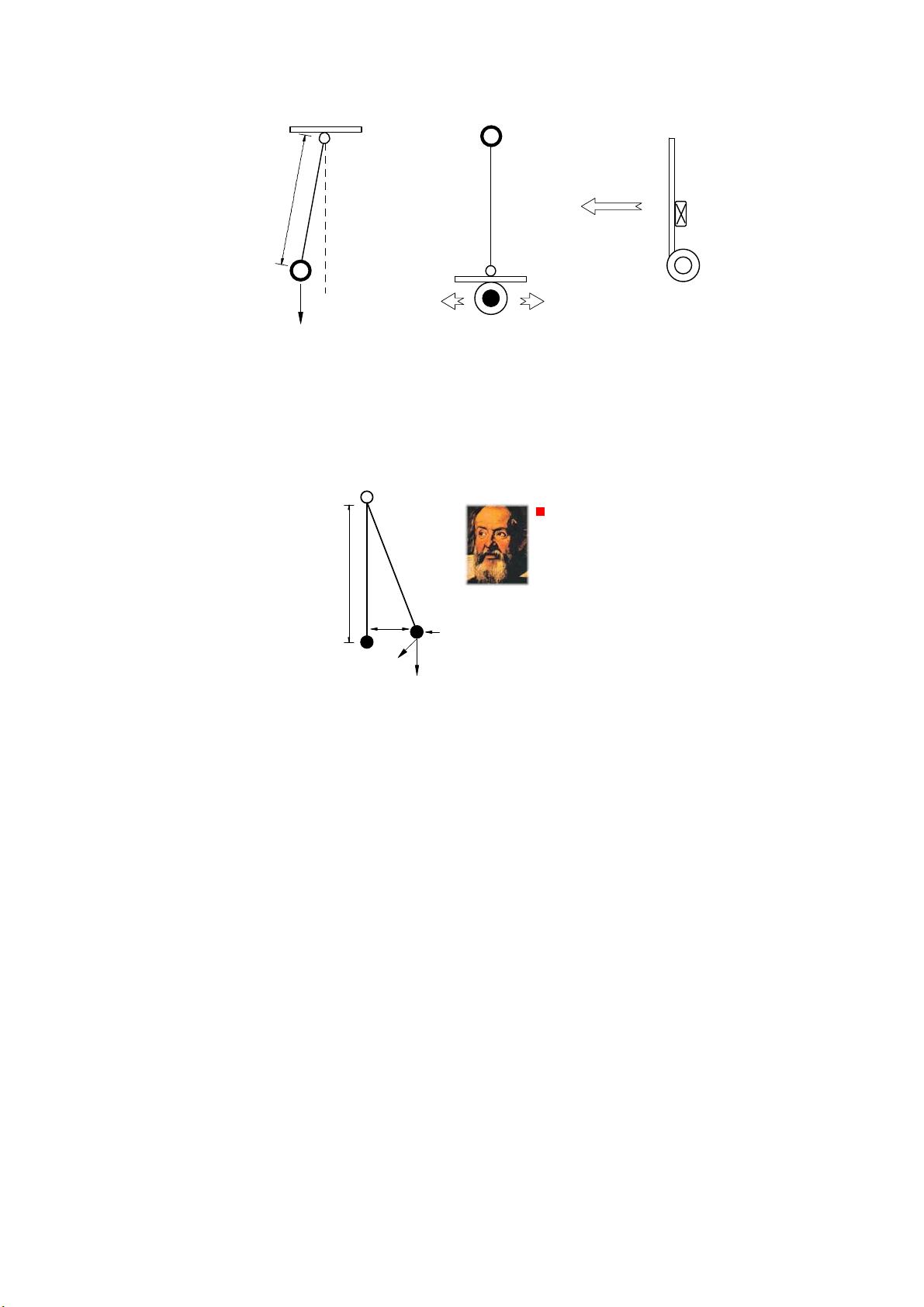
图 2.5 车模可以简化成倒立的单摆
普通的单摆受力分析如图 2.6 所示。
图 2.6 普通的单摆受力分析
当物体离开垂直的平衡位置之后,便会受到重力与悬线的作用合力,驱动重物回复
平衡位置。这个力称之为回复力,其大小为
sinFmg mg
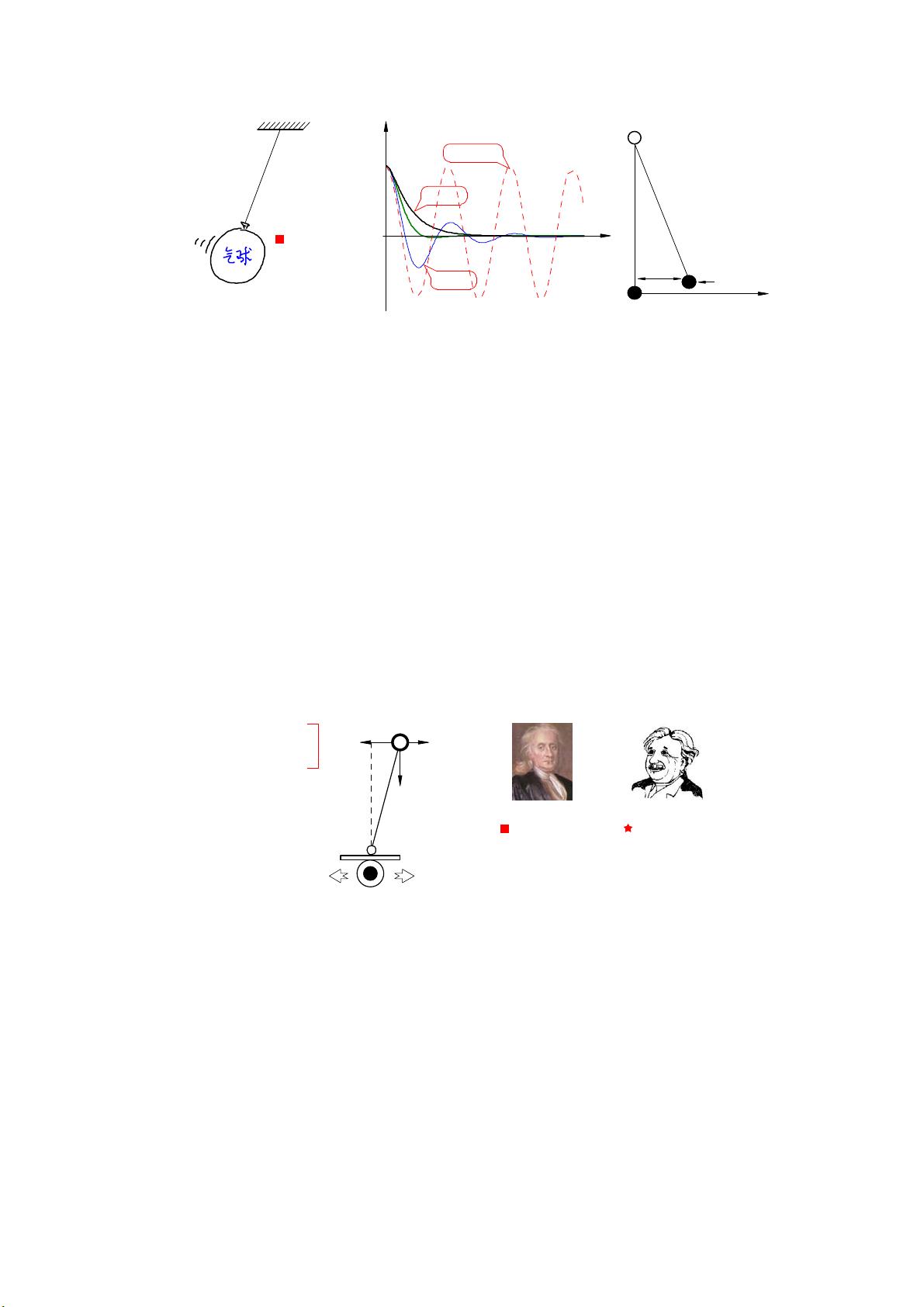
在此回复力作用下,单摆便进行周期运动。在空气中运动的单摆,由于受到空气的
阻尼力,单摆最终会停止在垂直平衡位置。空气的阻尼力与单摆运行速度成正比,方向
相反。阻尼力越大,单摆越会尽快在垂直位置稳定下来。图 2.7 显示出不同阻尼系数下,
单摆的运动曲线。
m
l
mg
θ
a
m
l
车模
简化
底部可以
运动的倒
立单摆
单摆模型
θ
l
sinθ
F=mg
l
质心
m
mgsinθ
伽利略
据说伽利略通
过观察吊灯的
摆动发现了单
摆运动的等时
性。
剩余48页未读,继续阅读
2021-07-12 上传
2021-06-26 上传
2018-01-09 上传
2011-12-11 上传
2022-07-03 上传
2018-11-06 上传
2019-12-16 上传
2018-04-15 上传
2023-04-20 上传

qq_39699358
- 粉丝: 2
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索AVL树算法:以Faculdade Senac Porto Alegre实践为例
- 小学语文教学新工具:创新黑板设计解析
- Minecraft服务器管理新插件ServerForms发布
- MATLAB基因网络模型代码实现及开源分享
- 全方位技术项目源码合集:***报名系统
- Phalcon框架实战案例分析
- MATLAB与Python结合实现短期电力负荷预测的DAT300项目解析
- 市场营销教学专用查询装置设计方案
- 随身WiFi高通210 MS8909设备的Root引导文件破解攻略
- 实现服务器端级联:modella与leveldb适配器的应用
- Oracle Linux安装必备依赖包清单与步骤
- Shyer项目:寻找喜欢的聊天伙伴
- MEAN堆栈入门项目: postings-app
- 在线WPS办公功能全接触及应用示例
- 新型带储订盒订书机设计文档
- VB多媒体教学演示系统源代码及技术项目资源大全
