清华大学《机械原理》复习要点:机构自由度与四杆机构分析
版权申诉
"清华大学《机械原理》期末复习资料包含了平面机构的结构分析和连杆机构的基本知识,旨在帮助学生掌握机械原理的核心概念。"
在机械原理的学习中,平面机构的结构分析是基础,主要涉及以下几个关键知识点:
1. **运动链成为机构的条件**:当一个运动链中的构件数目、相对运动和约束关系满足特定条件时,它可以被视为机构。机构的自由度是衡量其运动可能性的重要指标。
2. **机构自由度的计算**:平面机构自由度的计算公式是F = 3n - 2p - l,其中F代表自由度,n为构件数,p为低副数,l为高副数。正确识别并处理复合铰链、局部自由度和虚约束是计算自由度的关键。复合铰链包含多个转动副,局部自由度如滚子可被视为消除约束,而虚约束则是在机构设计中重复约束了运动。
3. **平面机构的组成原理**:平面机构由原动件、机架和基本杆组构成。理解这一原理有助于分析和设计复杂的机构系统。
连杆机构部分,特别是平面四杆机构,是机械设计中的重要元素,学习要点包括:
1. **平面四杆机构的三种基本型式**:曲柄摇杆机构、双曲柄机构和双摇杆机构,每种都有其独特的运动特性。
2. **平面四杆机构有曲柄的条件**:最短杆与最长杆长度之和小于或等于其他两杆长度之和,并且最短杆不能作为机架。这确保了机构能够产生连续的旋转运动。
3. **压力角和传动角**:压力角描述力作用线与速度方向之间的角度,而传动角是与压力角互补的角度,直接影响机构的效率。
4. **急回运动和行程速比系数**:急回运动是指机构在某些行程中运动速度快,在其他行程中速度慢的现象。行程速比系数K决定了急回特性的程度,与极位夹角θ密切相关。
5. **死点位置**:当机构中的连杆和从动件在某一位置上不能继续推动时,就处于死点位置,此时机构的动力传递会暂时中断。
通过对这些核心概念的深入理解和应用,学生将能够有效地进行机械设计和分析,以应对清华大学《机械原理》课程的期末考试。
5
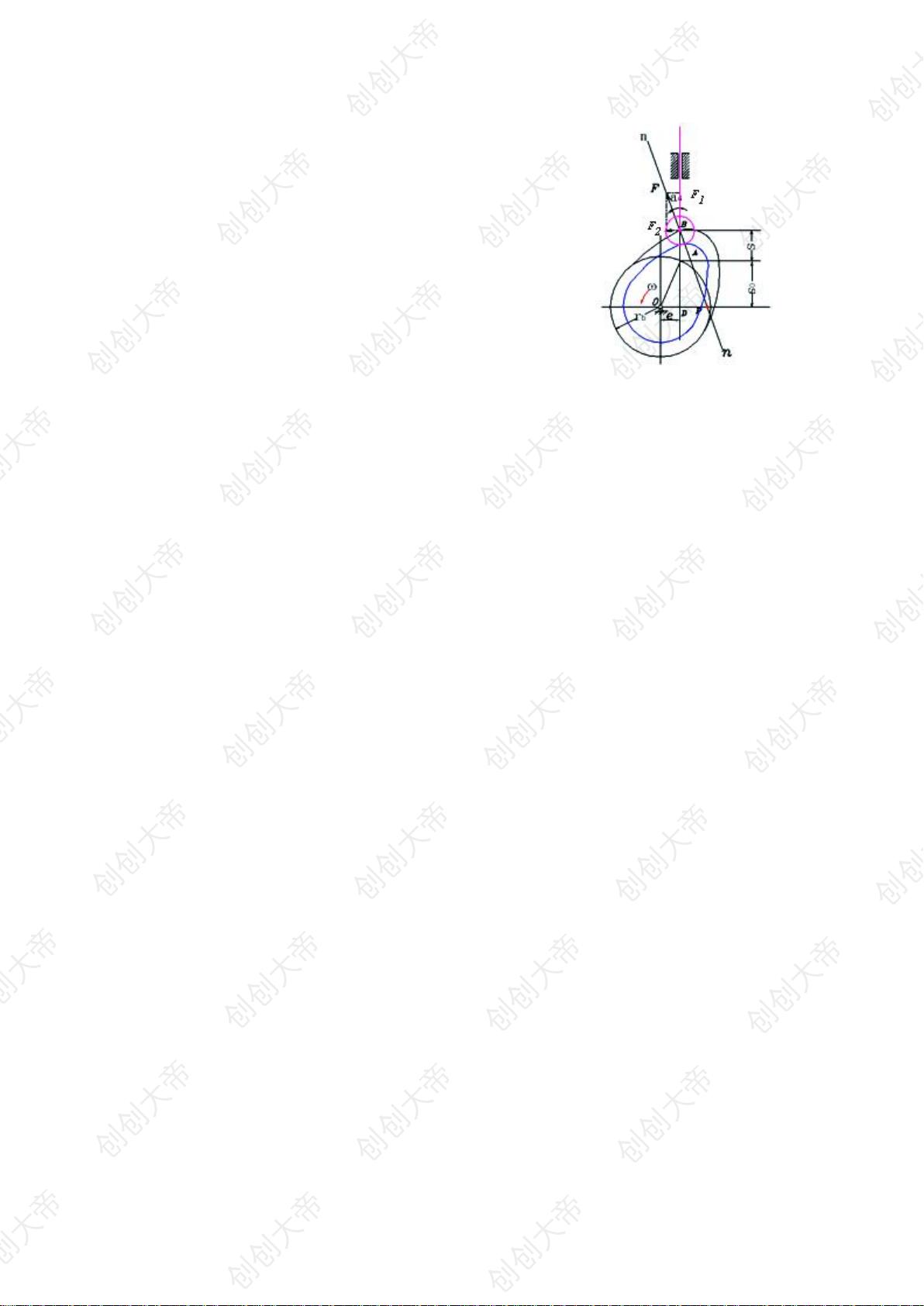
1.凸轮机构的压力角
压力角:在不计摩擦的情况下,凸轮对从动件作用力
的方向线与从动件上力作用点的速度方向之间所夹的
锐角。
2.压力角与机构尺寸的关系
压力角与基圆半径的关系:
压力角越大,基圆半径越小,即凸轮尺寸越小。
3.滚子半径的选择
滚子从动件盘形凸轮的实际廓线,是以理论廓线
上各点为圆心作一系列滚子圆,然后作该圆族的包络
线得到的。因此,凸轮实际廓线的形状将受滚子半径
大小的影响。若滚子半径选择不当,有时可能使从动件不能准确地实现预期的运
动规律。
重点复习“机械原理辅导与习题”—P
62
例 1
重点复习“机械原理辅导与习题”—P
72
题 3.12
第四章 齿轮机构
4.1 渐开线标准齿轮的参数和尺寸
1.齿轮各部分的名称和代号
分度圆:人为选定的设计齿轮的基准圆。半径用 r、直径用 d 表示
齿顶圆:过所有轮齿顶端的圆。半径 用 ra、直径用 da 表示。
齿根圆:过所有齿槽底部的圆。半径 用 rf 、直径用 df 表示。
基圆:产生渐开线的圆。半径用 rb、直径用 db 表示。
2.基本参数
知道了齿轮各部分的定义及名称,齿轮各部分的关系是怎样的?如何进行计
算?为此,规定了以下五个基本参数:
(1)齿数 Z;
(
2
)分度圆模数
(3)分度圆压力角
(
4
)齿顶高系数
(
5
)顶隙系数
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
创创大帝
剩余23页未读,继续阅读
2021-04-08 上传
2021-04-04 上传
2021-09-01 上传
2021-04-04 上传
2021-05-27 上传
2019-12-06 上传
2020-02-03 上传


创创大帝(水印很浅-下载的文档)
- 粉丝: 2343
- 资源: 5272
 我的内容管理
展开
我的内容管理
展开







最新资源
- 前端面试必问:真实项目经验大揭秘
- 永磁同步电机二阶自抗扰神经网络控制技术与实践
- 基于HAL库的LoRa通讯与SHT30温湿度测量项目
- avaWeb-mast推荐系统开发实战指南
- 慧鱼SolidWorks零件模型库:设计与创新的强大工具
- MATLAB实现稀疏傅里叶变换(SFFT)代码及测试
- ChatGPT联网模式亮相,体验智能压缩技术.zip
- 掌握进程保护的HOOK API技术
- 基于.Net的日用品网站开发:设计、实现与分析
- MyBatis-Spring 1.3.2版本下载指南
- 开源全能媒体播放器:小戴媒体播放器2 5.1-3
- 华为eNSP参考文档:DHCP与VRP操作指南
- SpringMyBatis实现疫苗接种预约系统
- VHDL实现倒车雷达系统源码免费提供
- 掌握软件测评师考试要点:历年真题解析
- 轻松下载微信视频号内容的新工具介绍
