MATLAB预测控制工具箱教程:伺服系统设计与约束
"预测控制MATLAB工具箱是用于模型预测控制设计的一个专业工具,适合初学者学习使用。这个工具箱提供了伺服系统控制器设计的实例,包括数学模型的建立、控制目标与约束的设定,以及如何在MATLAB环境中定义状态空间模型。"
在MATLAB中,预测控制是一种基于未来动态行为预测的控制策略,它通过优化一系列未来时域内的系统行为来确定当前的控制输入。预测控制MATLAB工具箱是实现这一策略的有效平台,尤其对于初学者,它提供了内置的示例和指导,帮助用户快速理解和应用预测控制理论。
1. 设计示例:
伺服系统控制器的设计是一个典型的应用场景。位置伺服系统通常由直流电机、变速箱、弹性轴和负载组成。其数学模型可以通过微分方程来描述,这些方程反映了系统各个部分的动力学特性。例如,状态方程可以用来表示系统的动态行为,其中包含系统状态变量和输入变量。
2. 控制目标及约束:
在伺服系统中,控制目标通常是使负载角位置跟踪给定的参考信号。同时,考虑到系统的实际限制,如弹性轴承受的扭矩约束和输入电压的限制,这些约束需要在控制设计中予以考虑。控制输出只有位置是可观测的,而力矩通常是不可观测的。
3. MATLAB中的状态空间模型:
定义系统状态空间模型是预测控制的关键步骤。在MATLAB中,可以使用内置函数`mpcmotormodel`或者直接编写命令来创建系统模型。例如,对于上述伺服系统,参数如轴的长度、直径、材料属性、弹性模量、电机和负载的惯量、摩擦系数等都需要明确指定。
4. 输入与输出:
伺服系统有一个输入电压V,两个输出:位置θ(可测量)和扭矩T(不可测量)。在预测控制中,通常会根据测量的输出和设定的目标来预测未来的系统行为,并据此计算最优控制输入。
5. 预测控制流程:
预测控制的工作流程一般包括:(1)构建系统模型;(2)定义预测模型的时域;(3)制定性能指标和约束条件;(4)求解优化问题以得到未来时间段的最佳控制序列;(5)应用当前步的控制输入并更新模型状态;(6)重复以上过程直到达到控制目标或满足停止条件。
通过MATLAB预测控制工具箱,用户不仅可以学习到预测控制的基本概念,还能实践如何在实际系统中应用这些概念,这对于深入理解预测控制算法及其在工程应用中的价值至关重要。
5
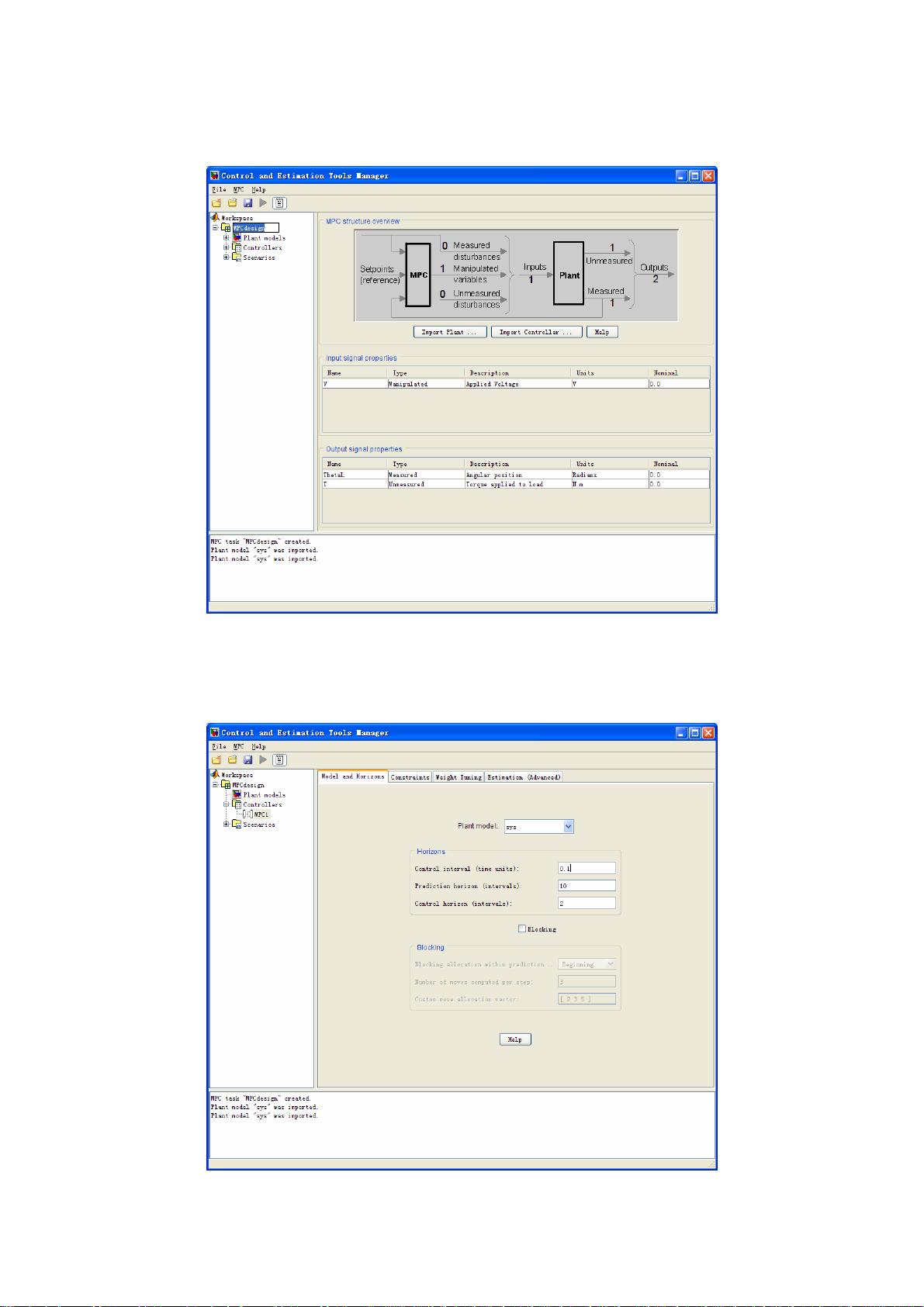
可以修改输入变量和输出变量的名称,增加描述性内容,设置单位和初始值。此处将
In1,Out1,Out2 修改为 V,ThetaL,T,其它修改见图 4-3。
图 4-3 Design Tool After Importing the Plant Model and Specifying Signal Properties
本例中的模型为连续系统,需要将之变为离散系统。选中
MPCdesign---Controllers---MPC1---Model and Horizons,将 Control interval(time units)(采样
周期)改为 0.1,其它设置不变,见图 4-4。
剩余21页未读,继续阅读
156 浏览量
119 浏览量
2022-06-19 上传
557 浏览量
246 浏览量
2152 浏览量

qq_38352372
- 粉丝: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 如何验证缓冲区UTF-8编码的有效性
- SSM框架整合开发视频教程
- WORD字处理第1套题目要求解析
- 《C程序设计(第四版)》谭浩强著课件精要
- PHPExcelReader:高效的PHP类读取Excel文件
- 恐惧极客挑战:Re-entry-VR体验带你领略废弃飞船逃生之旅
- 基于C#和SQL的酒店管理系统毕业设计完整项目
- C++实现图形化扫雷游戏设计与开发
- OctoPrint-FileManager插件:OctoPrint的简化管理工具
- VIVO BBK5.1.11版本刷机工具使用指南
- Python基础与应用教程及源代码解析
- 如何使用C/C++读取图片EXIF信息的详细步骤
- Guzzle基础教程:构建Web服务客户端指南
- ArcGIS地图SDK for Unreal引擎1.0.0发布
- 实现淘宝式图片放大镜效果的jQuery教程
- 小波神经网络纹理分类工具的研发与应用
