改进鲁棒自调控制:处理带有非对称死区的Hammerstein非线性系统
201 浏览量
更新于2024-07-14
收藏 2.05MB PDF 举报
本文是一篇研究论文,发表于《机械工程师学会》(Proc IMechE Part I: J Systems and Control Engineering)2016年第230卷第5期,探讨了一种改进的鲁棒自适应控制器设计,针对具有非对称死区输入非线性的Hammerstein非线性系统。这类系统在实际应用中常见,例如工业自动化中的电机控制、机器人操作等,其中死区的存在可能导致控制性能下降。
文章的主要贡献在于提出了一种新颖的控制策略。首先,作者基于Hammerstein系统的参数化模型,通过采用带有死区权重因子的鲁棒递归最小二乘算法来估计和更新未知参数。这种算法能够有效地处理系统中的不确定性,并考虑到死区的影响,确保控制的有效性。
接着,论文引入了未模型化动态的估计作为反馈,设计了一种不依赖于自适应死区逆的补偿控制律。这种设计方法避免了传统死区处理中的复杂性和计算负担,提高了实时性。理论分析表明,整个闭环系统的信号保持在有限范围内,而输出跟踪误差可收敛至较小的剩余误差,保证了系统的稳定性与精度。
为了验证所提出的控制方法的有效性,作者通过数值仿真进行了展示。仿真结果表明,改进的鲁棒自适应控制器在实际操作条件下,能够有效地克服非对称死区带来的问题,提高系统的动态响应能力和跟踪精度,对于实际工程应用具有较高的实用价值。
这篇论文提供了一个实用的解决方案,对于理解和改进具有非对称死区输入非线性的Hammerstein系统具有重要的理论和实践意义,为该领域的控制系统设计提供了新的思考方向。
y(t)=u
T
(t)u + §(t) ð15Þ
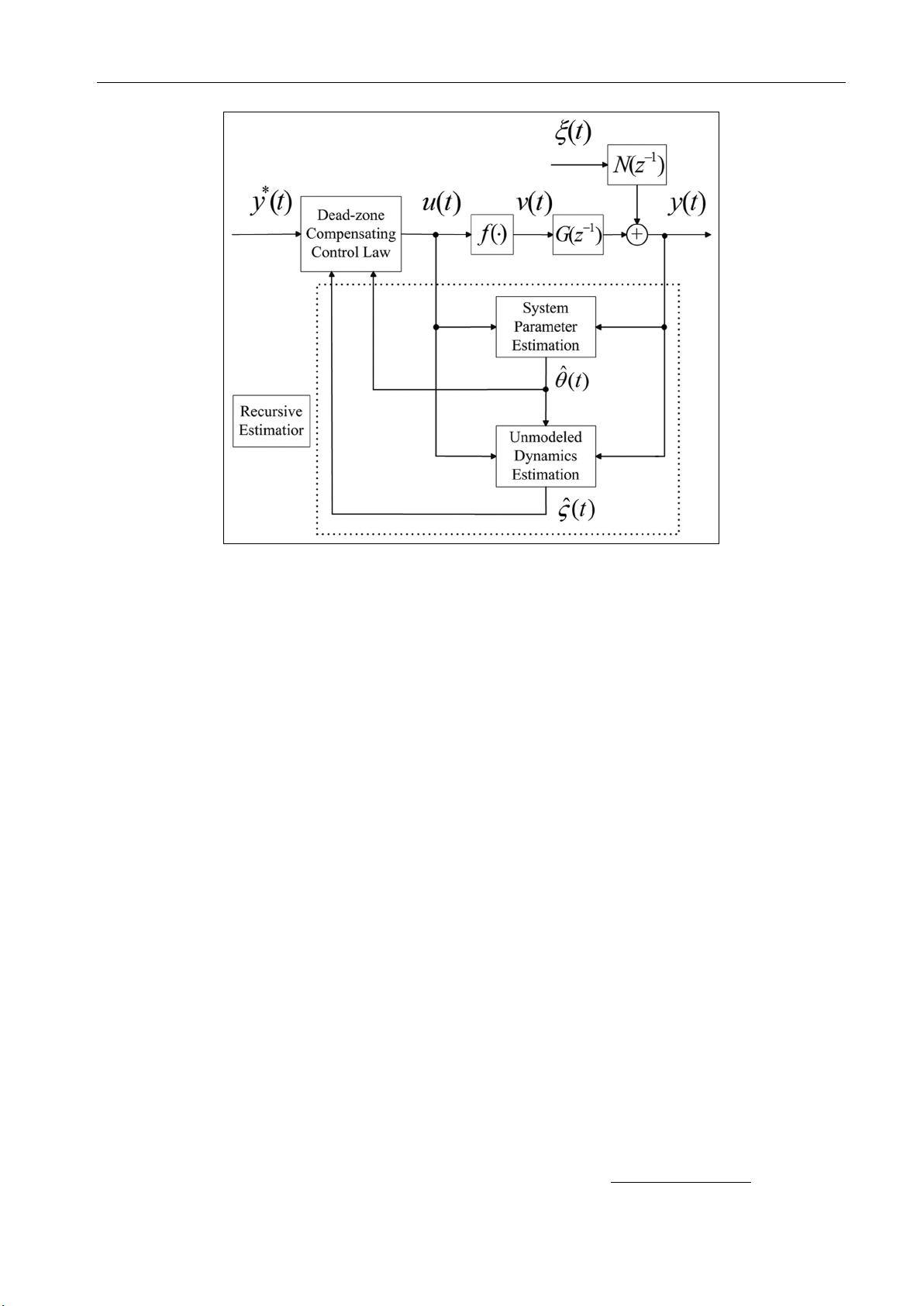
In connection with Figure 3, the objectives of this
article are to determine a control input such that the
system output y(t) asymptotically tracks the reference
y
(t) by minimizing the tracking error criterion given
by
Ju(t)½= y(t +1) y
(t +1)½
2
ð16Þ
Meanwhile, the closed-loop system stability is guar-
anteed for any instant t. To this end, the following
assumptions will be made concerning the system (15).
Assumption 3. The linear dynamic subsystem G(z
1
)is
of minimum phase.
Assumption 4. The nonlinearity §(t ) is assumed to satisfy
that
26,28–30
j§(t)j łmm(t)+M ð17Þ
m(t) łsm(t 1) + jju(t)jj + m
0
ð18Þ
where mø0, s 2½0, 1), m
0
ø 0 and M ø 0 are the user-
chosen constants. The selections of these coefficients
are flexible. For details, see subsection ‘‘Selections of
the coefficients in equations (17) and (18).’’
Remark 2. The upper bound of the nonlinearity §(t)isa
function of the signal regressive vector u(t), which is
different from the assumptions in Chen and
Narendra
31,32
and Fu colleagues
33,34
(the disturbance
or its differential term is globally bounded) or Zhang
and Mao,
22
and Kung and Womack
23,24
(the distur-
bance is Gaussian white noise with zero mean). It
should be noted that the boundedness of §(t) cannot be
guaranteed unless the vector u(t) is bounded.
35,36
Thus,
Assumption 4 relaxes the limitation of §(t) and
enhances the applicability of the proposed algorithm.
A novel adaptive control method
Recursive estimator
To solve the adaptive control problem stated in the pre-
vious section, the first issue is to establish the recursive
estimator.
Similar to equations (17) and (18), we first define
26
~
m(t)=s
~
m(t 1) + jju(t)jj + m
0
ð19Þ
E(t)=m
~
m(t)+M ð20Þ
Then, the initialization of equations (19) and (20)
can be
~
m(0) ø m(0). From equations (17)–(20), the
above initialization can guarantee that
~
m(t) ø m(t) and
E(t) ø j§(t)j for any instant t.
Based on equations (14), (19) and (20), the unmo-
deled dynamics §(t) can be treated as a bounded distur-
bance, and the problem becomes one of the linear
robust adaptive control.
The vector
^
u(t) is defined as the estimation of the
parameter vector u. It is updated by the following mod-
ified recursive least squares algorithm with a deadzone
weighted factor
20
^
u(t)=
^
u(t 1) +
a(t)P(t 1)u(t)e(t)
1+u
T
(t)P(t 1)u(t)
ð21Þ
Figure 3. Hammerstein system control scheme.
Zhang and Mao 439
剩余15页未读,继续阅读
152 浏览量
138 浏览量
166 浏览量
152 浏览量
166 浏览量
2021-03-14 上传
151 浏览量
2021-11-19 上传

weixin_38750003
- 粉丝: 7
- 资源: 927
 我的内容管理
展开
我的内容管理
展开







最新资源
- node-shopping-cart
- platzi-store-backend
- 小企业考勤表excel模版下载
- 宽敞阳光3D客厅模型设计
- upptime:Christ Christopher Demicoli的正常运行时间监控器和状态页面,由@upptime提供支持
- Colormix:将基本颜色与字符串语法相结合以创建任何 RGB 颜色。-matlab开发
- 在16x2 LCD显示屏上创建自定义动画-项目开发
- 舒适室内家装模型
- 值班表excel模版下载
- shortuuid:PHP 7.3+库可生成简洁,明确,URL安全的UUID
- laravel-webp
- uri-online-judge:ResoluçãodasQuestões做URI在线法官
- Unity ads demo
- dogify:帮助狗化网络!
- btech_cse_sem_4-material_-2021-MRU
- 超市进出货管理流程excel模版下载
