FANUC机器人Socket Message通讯设置与使用详解
FANUC机器人Socket Message通讯设置及使用手册(SM015_01.pdf)是上海发那科机器人有限公司针对其产品系列提供的一份中文技术文档,旨在帮助用户了解和配置FANUC机器人与上位机或工业相机之间的TCP/IP网络通信。这份手册涵盖了以下几个关键知识点:
1. **简介**:
- 介绍FANUC机器人如何通过TCP/IP协议进行与外部设备(如上位机或工业相机)的数据传输,这允许实现机器人与外部系统的双向通信,从而增强设备间的协同工作。
2. **软硬件要求**:
- **硬件**:适用于所有FANUC机器人型号,强调了USB存储器的使用,以便导入与Socket Message通讯相关的程序。
- **软件**:要求FANUC机器人系统至少运行在V8.30P版本,对于V9.10P系列则需要联系技术支持。Option软件方面,必须安装UserSocketMsg(R648)以支持Socket Message功能。
3. **机器人设定**:
- **系统变量设定**:详细指导用户如何在系统中启用Socket Message功能,涉及系统变量$KAREL_ENB的设置,将其值改为1来激活该功能。
- **IP地址设定**:提供了机器人控制器上设置IP地址的具体步骤,包括进入HostComm设置菜单,选择TCP/IP并配置端口和IP地址。
4. **软件导入与使用方法**:
- **软件导入**:提到使用USB存储器导入相关程序,这可能是通讯程序或者其他必要的配置文件。
- **使用方法**:包括程序调用、通讯程序示例以及如何在TP( Teach Pendant)程序中实现数据交换,比如使用指令规则`#R[i],R[i],R[i],R[i],R[i]`发送连续的寄存器值。
5. **示例与程序说明**:
- 提供了通讯程序的示例,帮助用户理解和实践实际操作,以及对如何编写和理解程序进行说明。
这份手册是一个实用的指南,为FANUC机器人的网络通信配置和程序开发提供了清晰的步骤和案例,对于维护者、开发者和操作人员来说,是理解和使用Socket Message通讯功能的重要参考资料。
SM-015/01
-4-
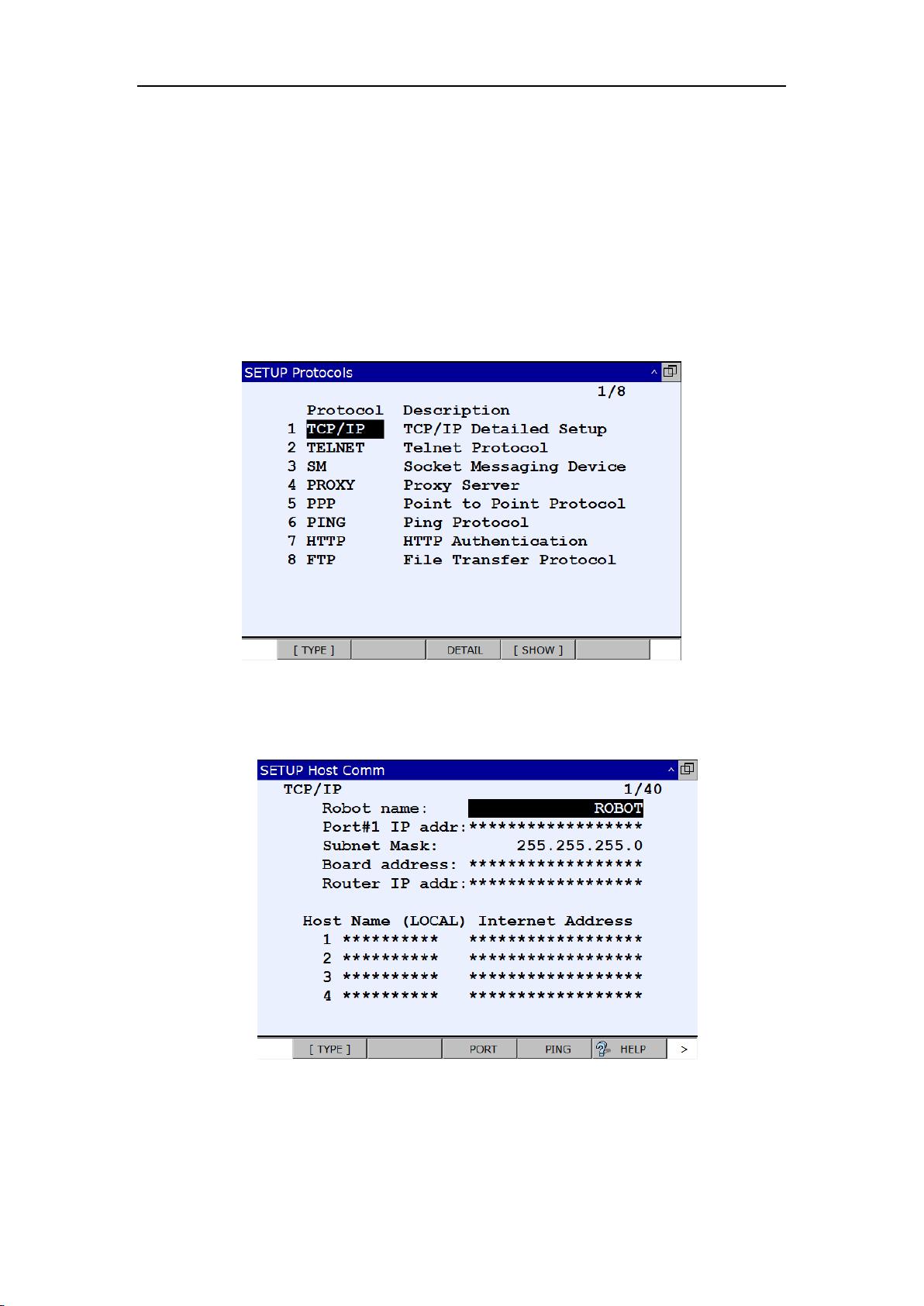
(1) 按 MENU 键
(2) 选择 SETUP
(3) 按 F1【TYPE】
(4) 选择 Host Comm,进入如下界面
选择 TCP/IP,按 Enter 键或 F3【DETAIL】键,进入:
在 Port#1 IP addr 所在行输入机器人的 IP 地址,例如 192.168.0.1。上位机的
IP 地址和机器人的 IP 地址需在同一网段,例如上位机 IP 地址可设为 192.168.0.2
剩余26页未读,继续阅读
2020-04-18 上传
2023-06-13 上传
2024-01-30 上传
2023-06-02 上传
2023-09-14 上传
2023-04-28 上传
2023-10-30 上传
2023-05-28 上传

qq598305632
- 粉丝: 1
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
