Beckhoff PLC:CANOPEn设置详解与PDO传输类型
本文档主要介绍了贝克霍夫(Bechhoff)PLC在CANOpen通信协议中的应用,以EL6751为主站控制器进行讲解,并对比了不同类型的PDO (过程数据对象)传输模式。CANOpen是一种基于CAN(Controller Area Network)的现场总线标准,用于设备之间的实时数据交换。
1. 主站设置(以EL6751为例):
EL6751作为主站,负责发起数据通信并管理从站。其功能强大,支持快速设置CANOPEn配置,这对于工业自动化和控制系统设计至关重要。
2. CANOpen传输类型:
PDO传输类型分为三种:
- Event-driven/Eventtimer: 主动式传输,当事件发生(例如输入值变化)或事件定时器到期时,发送TxPDO(传出过程数据对象)。此外,Eventtimer还用于监视RxPDO的watchdog,确保数据的实时性。
- Polled (全CAN和BasicCAN): 消费者通过发送远程帧询问数据。全CAN提供即时响应,而BasicCAN则在接收到远程帧后生成报文,虽然速度较慢,但数据更新及时。
- Synchronized (Cyclic/Acyclic): 消费者发送同步帧,其中Acyclic Synchronous模式的RxPDO仅在接收到下一个SYNC(同步消息)后才会被评估,例如在目标位置控制中。Cyclic Synchronous模式下,TxPDO按固定周期发送,周期可以根据需求设置,如数字量输入的快速循环(n=1)与模拟量输入的慢速循环(n=10)。
3. PDO传输类型选择:
- Transmission type 0: Acyclic Synchronous,适用于目标位置报文接收,只在接收到下一个SYNC后处理。发送方面,需同时满足事件触发条件。
- Transmission types 1-240: Cyclic Synchronous,TxPDO按照预定周期n发送,n取值范围1到240,可以根据应用调整循环频率。
理解并灵活运用这些PDO传输类型有助于优化工业自动化系统的性能,确保数据的可靠性和实时性。在实际操作中,选择合适的PDO类型取决于系统的需求,如实时响应速度、数据一致性以及资源分配等因素。掌握这些设置将对贝克霍夫PLC的用户和维护人员来说是一项关键技能。
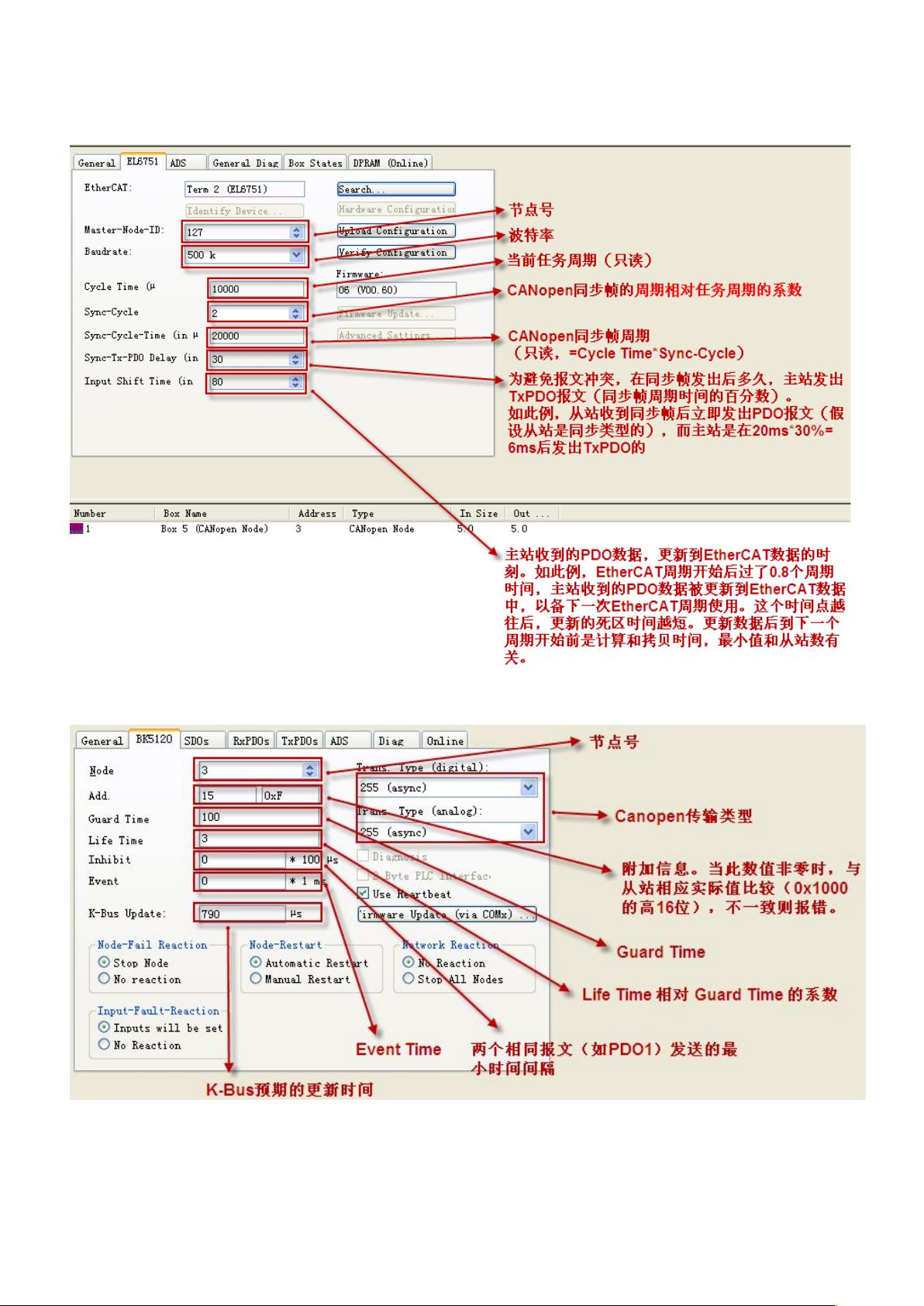
I 主站的设置(以 EL6751 为例)
II Beckhoff 从站的设置(以 BK5120 为例)
CanOpen 的传输类型(Trans. Type):
PDO 分为 3 大类传输类型。
下载后可阅读完整内容,剩余4页未读,立即下载
1200 浏览量
点击了解资源详情
点击了解资源详情
118 浏览量
1143 浏览量
109 浏览量
147 浏览量
469 浏览量
224 浏览量

lliuyongjie
- 粉丝: 4
- 资源: 24
 我的内容管理
展开
我的内容管理
展开







最新资源
- 易语言源码文件属性对话框模块源码.rar
- moneyConvert
- digipost-api-client-java-5.0.zip
- labview控制,如何给c语言源码做个界面,c语言
- 64个24px图标 .sketch素材下载
- sdl-helper-cpp:一种使SDL更轻松,更快速的方法
- 14.0(FromXcode_12_beta_3_xip).zip
- homebrew-redis-cli:通过homebrew安装redis-cli
- 安卓Android二次元社区论坛bbs绘画app可导入AndroidStudio
- Universal-CollapsingTabLayout,折叠带Tablayout的工具栏布局。.zip
- blekso.github.io:米哈伊尔·伊施特万(MihaelIštvan)
- Baekjoon-Algorithm:算法研究
- 易语言枚举注册表
- opengrok_tool.zip
- Cross-platform-programming-Lab1
- matlab代码sqrt-machine_learning_PCA:基于Matlab的PCA
