PIXHAWK飞控详解:从硬件到应用
需积分: 33 187 浏览量
更新于2024-07-21
5
收藏 1.47MB PDF 举报
"PIXHAWK飞控是一个开源的飞行控制器,由硬件厂商3DR推出,基于32位ARM处理器的STM32F427 Cortex-M4和STM32F103,提供强大的计算能力和稳定性。它整合了PX4FMU和PX4IO,具有透明的硬件设计,允许扩展和开发。"
文章正文:
PIXHAWK飞控是无人机领域的一个重要组成部分,它基于开放源代码的Ardupilot项目,旨在为用户提供一个高度可定制和高性能的飞行控制系统。这个系统的设计理念是让硬件和软件都尽可能地透明,以便于开发者和爱好者进行深入的研究和改进。
在硬件层面,PIXHAWK的核心是一个32位的STM32F427微控制器,这是一款高速、高性能的处理器,运行频率高达168MHz,配备256KB RAM和2MB Flash存储空间,能够处理复杂的飞行控制算法。此外,它还包括了一个工业级的协处理器STM32F103,用于确保系统的安全和稳定性,即使主处理器出现故障,也能保证基本的飞行安全。
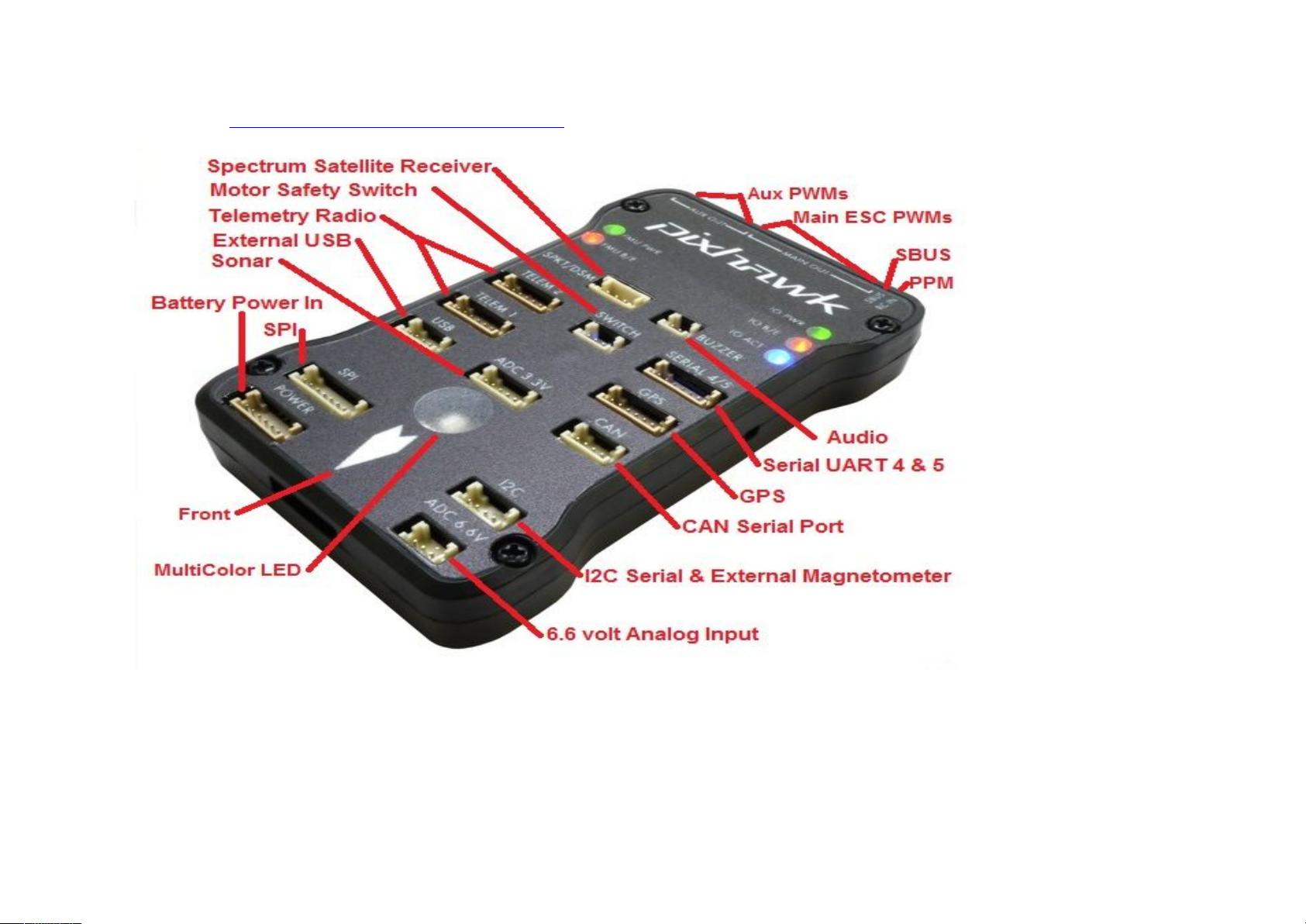
该飞控系统的一大特点是其丰富的接口和引脚设计。所有总线和外设都直接引出,这不仅使得用户能够方便地添加额外的设备或传感器,还为有开发能力的用户提供了广阔的自定义空间。例如,用户可以利用这些接口连接GPS模块、IMU(惯性测量单元)、遥控器接收机以及各种其他传感器,以实现更高级的飞行功能,如自主飞行、避障和精准定位。
在软件方面,PIXHAWK支持Ardupilot固件,这是一个经过充分测试和优化的飞行控制软件,包含了多种飞行模式,如手动、姿态、GPS导航等。用户可以通过地面站软件如Mission Planner或QGroundControl进行参数配置、任务规划和实时数据监控。
关于使用说明,PIXHAWK的安装和配置通常涉及以下几个步骤:
1. 连接电源和电池,确保电压和电流符合要求。
2. 连接传感器和执行器,如电机、电调、GPS等,根据提供的连接图进行正确接线。
3. 安装固件,这通常需要通过USB连接到电脑,并使用地面站软件进行更新。
4. 配置参数,根据飞行需求调整飞行控制器的各项设置。
5. 进行校准,包括IMU、磁罗盘、遥控器等,以确保传感器数据的准确性。
6. 在安全环境下进行试飞,逐步验证和优化飞行性能。
PIXHAWK社区是其成功的关键因素之一。用户可以通过加入开源群组160094967或访问论坛http://bbs.wikiuav.org/forum.php获取帮助、分享经验或参与讨论。这个活跃的社区不断推动着PIXHAWK的改进和新功能的开发,使其保持在无人机技术的前沿。
PIXHAWK飞控是一个强大而灵活的平台,它将先进的硬件与开放源代码软件相结合,为无人机爱好者和专业人士提供了无限的创新可能。无论是为了学术研究、商业应用还是娱乐,PIXHAWK都能提供可靠的飞行控制解决方案。

剩余30页未读,继续阅读
2589 浏览量
188 浏览量
1637 浏览量
2700 浏览量
594 浏览量
912 浏览量

WangLanguager
- 粉丝: 1w+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Kribosw 主文件分析与应用
- GitHub项目树状导航插件octotree发布新版
- 农机服务效益分析Excel模板下载
- cLaunch v12.04:基于tdLaunch代码的PocketPC Today屏幕启动器
- 创建自定义npm包页面的Node.js命令行工具
- Red5 实例演示与压缩工具应用解析
- CS研究生分享学习数据结构与算法的旅程
- 大型公关营销活动成功案例分析与参考指南
- WebXR精选游戏体验:谷歌师兄的leetcode刷题笔记
- HTML中压缩包子文件的使用技巧
- 农村义务教育贫困生免杂费资金分配Excel模板
- Academic Kickstart:搭建个性化学术网站指南
- 易语言实现数据库与树形框无限分类管理
- 房产手机应用演示程序
- 脚本引擎:一种多功能命令行工具,支持Python与Shell脚本
- Python实现对抗熵最小化在语义分割领域自适应研究
