BP神经网络优化PID参数整定原理与算法
版权申诉
194 浏览量
更新于2024-08-10
1
收藏 87KB DOCX 举报
"该文主要探讨了如何利用BP神经网络对PID控制器的参数Kp、Ki和Kd进行优化整定,以实现系统的最佳控制效果。"
在自动化控制领域,PID(比例-积分-微分)控制器因其简单易用和良好的控制性能而被广泛应用。然而,传统固定参数的PID控制器可能无法适应所有工况变化,因此需要根据系统动态特性进行参数调整。BP(Backpropagation)神经网络作为一种有效的机器学习模型,能通过学习系统运行状态来自动调整PID参数,从而提高控制性能。
BP神经网络由输入层、隐藏层和输出层组成。在BP神经网络用于PID参数整定的场景中,输入层的神经元数量可以根据被控系统的复杂性选取,包括系统输入、输出、误差以及可能的其他相关参数。隐藏层的神经元数量则根据系统的复杂程度灵活调整,以保证网络具有足够的非线性表达能力。输出层包含三个神经元,分别对应PID控制器的三个参数Kp、Ki和Kd。
网络的训练目标是通过梯度下降法调整权重,以最小化性能指标。这里采用的是一种增量式数字PID控制算法,通过调整Kp、Ki和Kd使得系统误差减小。网络的输出层神经元通常使用正sigmoid函数,确保输出参数为正。在训练过程中,网络根据误差的负梯度方向调整权重,同时加入惯性量以加速收敛。
基于BP神经网络的PID控制算法步骤大致如下:
1. 预先设定网络结构,包括输入层和隐藏层的节点数,初始化权重,确定学习速率和平滑因子。
2. 采集系统数据,计算误差e(k)。
3. 对输入数据进行归一化处理,作为神经网络的输入。
4. 前向传播计算网络输出,即PID参数。
5. 使用计算出的参数控制输出u(k)。
6. 计算并修正输出层权重。
7. 更新隐藏层权重。
8. 迭代上述过程,直到满足停止条件。
通过仿真案例,可以验证这种基于BP神经网络的PID控制器在不同系统上的性能。通过调整网络结构和训练参数,可以实现对各种复杂系统的自适应控制,提高控制精度和稳定性。
总结来说,BP神经网络用于PID参数整定是一种智能控制策略,它结合了神经网络的自学习能力和PID控制器的实时调整能力,能够在不断变化的环境中优化控制性能。这种方法尤其适用于那些难以通过传统方法精确整定参数的复杂控制系统。
BPNN
PID 控制器
Plant
de/dt
rin
yout
error
Kp Ki
Kd
BP 神经网络 PID 控制
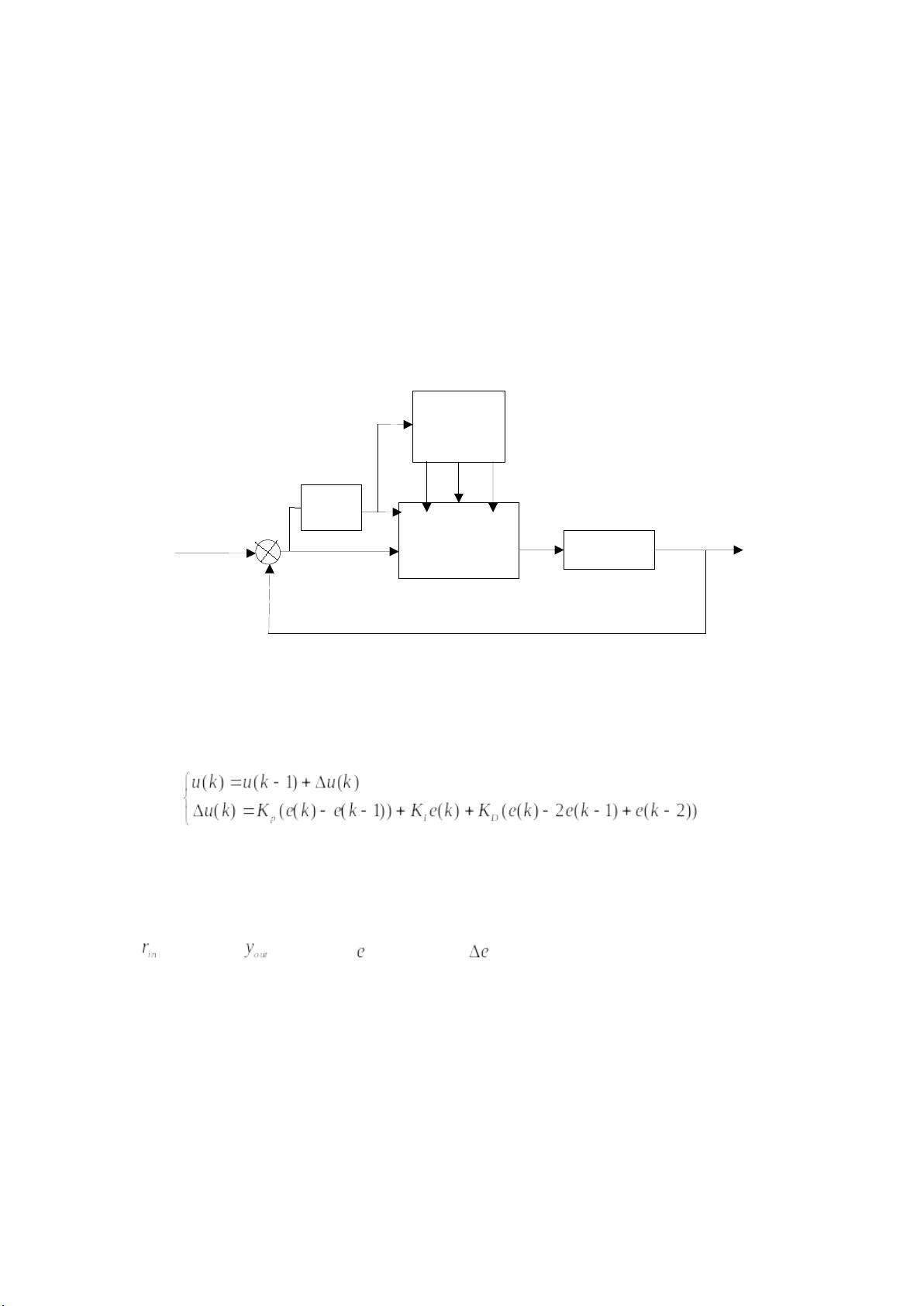
BP 神经网络的原理不再赘述,采用 BP 神经控制对 PID 进行参数整定的原理框图如
下 :
BP 神经网络可以根据系统运行的状态,对 PID 参数 Kp,Ki 和 Kd 进行调节,使系统
达到最优的控制状态。经典的增量式数字 PID 的控制算法为:
采用三层 BP 神经网络结构。
输入层神经元个数可根据被控系统的复杂程度选取。可从如下参数中选取,系统输入
,系统输出 ,系统误差 ,和误差变量 ,可在系统误差 e 的基础之上再加上其他
参数输入,使 BP 神经网络能够适应更为复杂的系统的 PID 参数整定。
隐层神经元的个数视被控系统的复杂程度进行调整,一本系统复杂时,就需选用更多
的隐层神经元。
输出层的神经元个数为 3 个,输出分别为 Kp,Ki 和 Kd。
隐层神经元函数一般选取正负对称的 sigmoid 函数:
下载后可阅读完整内容,剩余3页未读,立即下载
2022-09-22 上传
2022-03-22 上传
185 浏览量
2021-09-30 上传
2024-05-05 上传
2022-07-13 上传
2022-05-10 上传
2021-10-03 上传
2022-07-15 上传

Aamboo
- 粉丝: 19
- 资源: 560
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
