KUKA DeviceNet Seminar Workbook: Fieldbus Technology
需积分: 10 17 浏览量
更新于2024-07-22
收藏 6.27MB PDF 举报
"DeviceNet_en - FIELDBUS TECHNOLOGY - SEMINAR WORKBOOK for KUKA System Software V4.x/V5.x"
该资源是一个关于DeviceNet技术的研讨会工作手册,特别针对KUKA机器人系统的软件版本V4.x和V5.x。DeviceNet是一种基于CAN(Controller Area Network)的现场总线系统,常用于工业自动化领域,它允许设备间进行高效、可靠的通信。
在研讨会中,参与者将深入理解DeviceNet的工作原理,如何集成到KUKA机器人系统中,以及如何利用KUKA的System Software V4.x或V5.x来配置和管理DeviceNet网络。这个手册涵盖了以下关键知识点:
1. **DeviceNet基础**:介绍DeviceNet的基本概念,包括其在网络中的角色,协议结构,以及如何通过DeviceNet连接和控制不同类型的工业设备。
2. **CAN总线技术**:讲解CAN总线的基础知识,包括其物理层特性,数据链路层的帧结构,以及其在DeviceNet中的应用。
3. **KUKA System Software**:详述KUKA系统软件的功能和特点,尤其是V4.x和V5.x版本对DeviceNet的支持,包括配置工具,诊断功能,以及编程接口。
4. **网络配置**:如何规划和建立DeviceNet网络,包括设备的地址分配,网络拓扑结构设计,以及确保通信的可靠性。
5. **设备集成**:讨论如何将各种工业设备(如传感器、执行器等)集成到DeviceNet网络中,包括设备的认证过程和通信协议设置。
6. **故障排查与维护**:提供故障诊断和网络维护的策略,帮助用户解决可能出现的通信问题。
7. **安全考虑**:强调在使用DeviceNet时的安全措施,包括防止未授权访问和保护网络免受干扰。
8. **案例研究**:可能包含实际应用案例,展示DeviceNet在自动化生产线上的具体实施和效果。
尽管手册的内容已经过检查以确保与硬件和软件描述相符,但制造商KUKA Roboter GmbH声明,由于技术的不断发展,可能存在未描述的新功能,而且他们不保证完全的兼容性。此外,手册可能会定期更新以修正任何发现的错误或遗漏。
最后,需要注意的是,KUKA Roboter GmbH对于技术信息中的任何错误不承担任何责任,用户在使用时应遵循最新的文档和指导。这表明用户必须保持对最新技术信息的关注,以便获取最准确的操作指南。
Introduction field bus technology
16 / 148 Workbook FBT DEV KR C2 03.06.01
I 03.09.2003 I College I PRhI 7
KUKA Roboter GmbH, Hery-Park 3000, D-86368 Gersthofen, Tel.: +49 (0) 8 21/45 33-1906, Fax: +49 (0) 8 21/45 33-2340, http://www.kuka-roboter.de
© Copyright by KUKA Roboter GmbH College
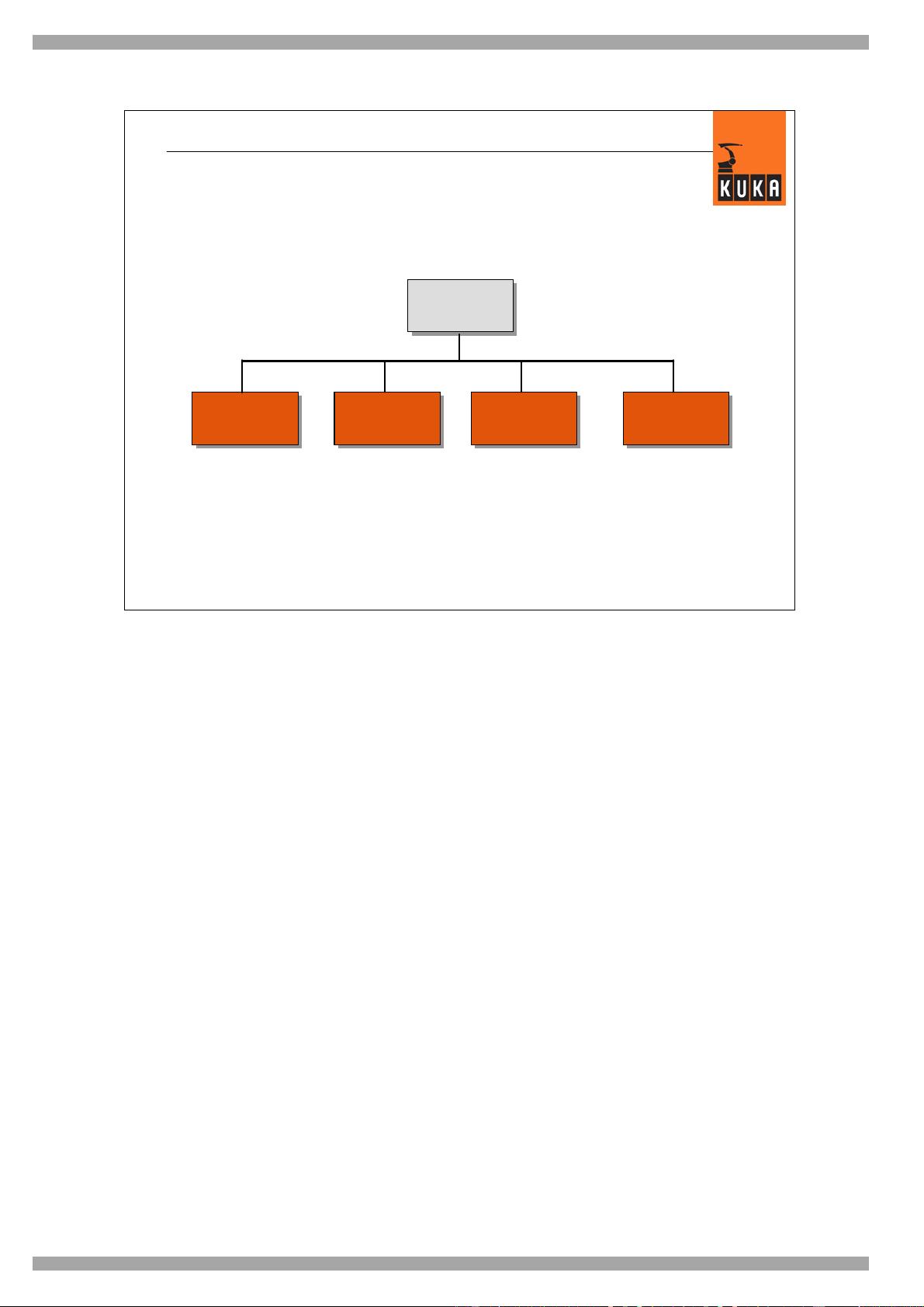
Master/slave (Profibus or DeviceNet)
Master
Slave Slave Slave Slave
Master/slave
In the master/slave bus access procedure, the bus traffic is controlled by the master. The slaves answer
only in response to a prompting telegram from the master. Otherwise the slaves remain passive.

剩余147页未读,继续阅读
2019-10-11 上传
2019-09-17 上传
2019-07-01 上传
2022-07-12 上传
2023-06-01 上传
2019-10-24 上传
2018-03-08 上传
2023-02-01 上传
2013-12-26 上传

qq_21196853
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 正整数数组验证库:确保值符合正整数规则
- 系统移植工具集:镜像、工具链及其他必备软件包
- 掌握JavaScript加密技术:客户端加密核心要点
- AWS环境下Java应用的构建与优化指南
- Grav插件动态调整上传图像大小提高性能
- InversifyJS示例应用:演示OOP与依赖注入
- Laravel与Workerman构建PHP WebSocket即时通讯解决方案
- 前端开发利器:SPRjs快速粘合JavaScript文件脚本
- Windows平台RNNoise演示及编译方法说明
- GitHub Action实现站点自动化部署到网格环境
- Delphi实现磁盘容量检测与柱状图展示
- 亲测可用的简易微信抽奖小程序源码分享
- 如何利用JD抢单助手提升秒杀成功率
- 快速部署WordPress:使用Docker和generator-docker-wordpress
- 探索多功能计算器:日志记录与数据转换能力
- WearableSensing: 使用Java连接Zephyr Bioharness数据到服务器
