"基于模糊补偿的液压机械臂轨迹跟踪控制方法研究"
版权申诉
66 浏览量
更新于2024-03-01
收藏 1.64MB DOCX 举报
基于模糊补偿的液压机械臂轨迹跟踪控制是针对液压驱动机械臂控制中存在的问题进行的研究。机械臂轨迹跟踪控制问题主要是在指定任务的前提下,由控制器带动关节执行器形成的广义力或广义力矩的过程,并在机械臂运动中要满足任务需求的稳定性和稳态性要求。液压驱动机械臂的轨迹跟踪控制具有机械臂本体为大负载设备、液压传动系统容易产生滞后、多种不确定因素等特点。
针对这些问题,国内外学者提出了各种不同的控制方法。例如,国外学者Truong等考虑了液压机械手的载荷变化工况,提出了自适应模糊位置控制方法,并结合后推滑模控制设计了在线干扰观测器,使用李亚普洛夫函数证明了系统的稳定性;Kim等提出了一种基于时滞控制和终端滑模控制的新型离散无模型鲁棒控制器,能够使末端执行器位置追踪误差降低在2cm以内,具有极大的应用价值。
本研究旨在通过模糊补偿的方法来改善液压机械臂轨迹跟踪控制的性能。在液压系统控制中,模糊补偿是一种应对不确定因素和非线性的有效手段。通过引入模糊补偿控制器,可以有效克服液压系统的滞后性和非线性特点,提高控制精度和轨迹跟踪效果。同时,通过液压系统参数模糊建模和模糊推理,可以克服系统不确定因素的影响,提高系统的稳定性和鲁棒性。
在研究中,我们首先对液压机械臂系统进行建模分析,包括机械臂本体、液压传动系统和控制器等模块。在建立系统动力学模型的基础上,我们针对液压传动系统的特点进行模糊建模和模糊控制器设计。通过模糊补偿控制器的设计和参数调节,实现对液压机械臂轨迹跟踪控制的改善。同时,我们也使用仿真实验和实际试验验证了所提出方法的有效性和性能优势。
研究结果表明,基于模糊补偿的液压机械臂轨迹跟踪控制方法能够显著提高控制精度和轨迹跟踪效果,有效克服了液压传动系统滞后性和非线性特点,同时也提高了系统的稳定性和鲁棒性。这对于液压驱动的大负载机械臂控制具有重要的理论意义和实际应用意义。
综上所述,基于模糊补偿的液压机械臂轨迹跟踪控制是针对液压机械臂控制中存在的问题进行的有效研究。通过引入模糊补偿控制器,可以有效改善液压机械臂的轨迹跟踪性能,提高系统的控制精度和稳定性,具有重要的理论和实际意义。希望这项研究能够为液压机械臂轨迹跟踪控制领域的进一步研究和应用提供有益的参考。
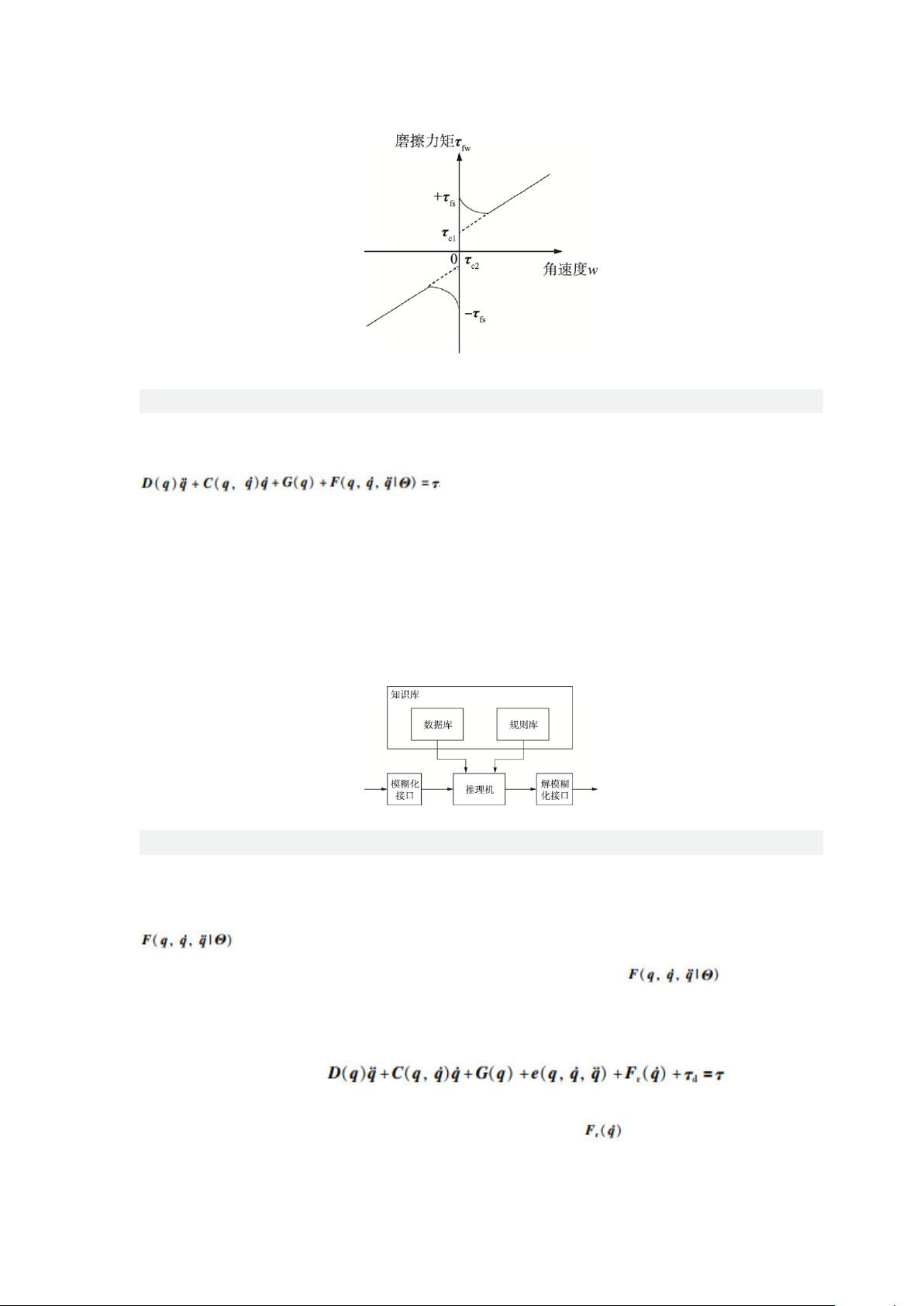
图 3 一般非线性摩擦模型 Fig.3 General nonlinear friction model
图选项
由于在实际控制中,液压机械臂存在摩擦力和变负载等干扰项,则实际机械臂动力学方程为:
为机械臂不确定干扰项.
2 控制器的设计 2.1 模糊补偿控制原理
模糊控制是一种新兴的以模糊集合理论为基础的控制手段,他可以以任意精度逼近任意函数,通常
包括 4 个部分,分别是:模糊化、推理合成、模糊规则基与反模糊化
[11]
,其基本结构如图 4 所示.
图 4 模糊逻辑系统结构 Fig.4 Fuzzy logic system structure
图选项
根据液压机械臂液压和机械特性分析,控制过程中主要影响因素包括液压缸与活塞运动产生的摩擦
力、关节转动产生的摩擦力、机械臂末端负载的重量以及其他干扰力的影响,统一表示为
,Θ 表示关节驱动力矩. 由于关节摩擦力一般与速度信号有关,负载力一般与位置和加速
度信号有关,为了减少模糊规则的数量,可以将机械臂动力学方程中的不确定项 进行分解
[12]
. 则分解后机械臂的动力学方程为
(10)
式中,e 为系统逼近误差项,e
D
、e
C
、e
G
分别为系统各参数误差, 为摩擦干扰项,τ
d
为负载
力矩. 则有:
剩余20页未读,继续阅读
2021-01-13 上传
2023-02-23 上传
2023-09-13 上传
2022-03-19 上传
2022-11-11 上传
2023-10-05 上传

罗伯特之技术屋
- 粉丝: 4373
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 批量文件重命名神器:HaoZipRename使用技巧
- 简洁注册登录界面设计与代码实现
- 掌握Python字符串处理与正则表达式技巧
- YOLOv5模块改进 - C3与RFAConv融合增强空间特征
- 基于EasyX的C语言打字小游戏开发教程
- 前端项目作业资源包:完整可复现的开发经验分享
- 三菱PLC与组态王实现加热炉温度智能控制
- 使用Go语言通过Consul实现Prometheus监控服务自动注册
- 深入解析Python进程与线程的并发机制
- 小波神经网络均衡算法:MATLAB仿真及信道模型对比
- PHP 8.3 中文版官方手册(CHM格式)
- SSM框架+Layuimini的酒店管理系统开发教程
- 基于SpringBoot和Vue的招聘平台完整设计与实现教程
- 移动商品推荐系统:APP设计与实现
- JAVA代码生成器:一站式后台系统快速搭建解决方案
- JSP驾校预约管理系统设计与SSM框架结合案例解析
