双DSP在废墟搜救雷达实时处理系统中的应用
PDF格式 | 202KB |
更新于2024-09-01
| 115 浏览量 | 举报
"基于双DSP的废墟搜救雷达实时处理系统设计,采用TMS320C6713B DSP,主DSP处理通信、数据采集、体动信号检测及预处理,从DSP处理静目标检测,通过HPI接口通信,解决实时性问题。"
在废墟搜救雷达系统的设计中,面临的主要挑战包括处理大量数据、执行复杂的算法以及满足实时性的要求。为了解决这些问题,本设计提出了一种基于双数字信号处理器(DSP)的并行处理系统。这种系统采用了两片TMS320C6713B DSP芯片,其中一片为主DSP,另一片为从DSP,各自承担不同的任务。
主DSP的主要职责包括与上位机的通信、数据采集、体动信号的检测以及静目标的预处理。它通过USB接口与上位机交互,接收指令参数,并通过多通道缓冲串行端口(McBSP)获取A/D转换器转化的数字信号。这些数据随后会被存储在外部存储器中,等待进一步处理。主DSP的体动信号检测和预处理步骤是实时分析雷达回波信号的关键,旨在筛选出可能包含生命特征的信号。
从DSP则专注于静目标的检测。由于废墟搜救雷达的目标检测需要高度精确,从DSP通过高速并行接口(HPI)从主DSP接收预处理后的数据,执行更深度的信号处理算法,以确认静止目标的存在。这种方式提高了整个系统的处理速度,确保了在复杂环境下仍能快速准确地识别生命体。
系统硬件设计包括FPGA(现场可编程门阵列),它辅助两片DSP进行数据采集和处理工作。FPGA具有高度的灵活性,可以根据需求配置为不同的逻辑功能,优化系统的性能。
软件处理流程包括从数据采集到结果上传的完整序列。首先,雷达信号经过A/D转换后被主DSP接收。接着,主DSP执行初步处理,然后通过HPI接口将处理结果传递给从DSP。从DSP执行高级算法,如特征提取和目标识别。最后,识别出的生命信息将被上传至上位机,供决策者参考。
为了提升系统的效率,软件程序进行了优化,可能包括流水线处理、并行计算以及算法的迭代改进。这种优化确保了即使面对大量数据和复杂算法,系统也能保持高效运行,满足实时搜救的需求。
基于双DSP的废墟搜救雷达实时处理系统通过分工合作,实现了对废墟中可能存在生命体的快速准确检测。其设计思路和实现方法为生命探测技术在灾害救援和军事行动等领域的应用提供了可靠的解决方案。
DSP中的基于双中的基于双DSP 的废墟搜救雷达实时处理系统设计的废墟搜救雷达实时处理系统设计
摘要:为了满足废墟搜救雷达数据量大.算法复杂.实时化要求高等特点,采用一种双DSP并行处理系统,主DSP
负责与上位机通信.数据采集.体动信号检测和静目标预处理,从DSP负责静目标的检测,通过从DSP的HPI接口
实现与主DSP之间的数据通信,解决了单DSP难以满足算法实时化的问题,阐述了处理系统的硬件设计.软件处
理流程与软件程序优化方法. 0 引言 近年来,搜救雷达技术成为生命探测领域的新秀,该技术融合雷达
技术.生命医学工程技术于一体,能够对废墟内的目标人体进行定位与跟踪,在灾害搜救.城区巷战等领域具有广
泛的应用前景,因此引起了人们的众多关注.由于应用环境复杂多变,废墟搜救雷达需对探
摘要:为了满足废墟搜救雷达数据量大.算法复杂.实时化要求高等特点,采用一种双DSP并行处理系统,主DSP负责与上
位机通信.数据采集.体动信号检测和静目标预处理,从DSP负责静目标的检测,通过从DSP的HPI接口实现与主DSP之间的数
据通信,解决了单DSP难以满足算法实时化的问题,阐述了处理系统的硬件设计.软件处理流程与软件程序优化方法.
0 引言
近年来,搜救雷达技术成为生命探测领域的新秀,该技术融合雷达技术.生命医学工程技术于一体,能够对废墟内的目标
人体进行定位与跟踪,在灾害搜救.城区巷战等领域具有广泛的应用前景,因此引起了人们的众多关注.由于应用环境复杂多
变,废墟搜救雷达需对探测区域是否存在生命体快速准确作出判别,因此,如何实时识别生命目标,确定其相关位置至关重
要.单片DSP构成的信号处理系统难以满足需求,本文介绍一种基于HPI接口的双DSP处理系统,该系统具有速度快.灵活性高.
体积小.功耗低等特点,被成功运用于废墟搜救雷达中.
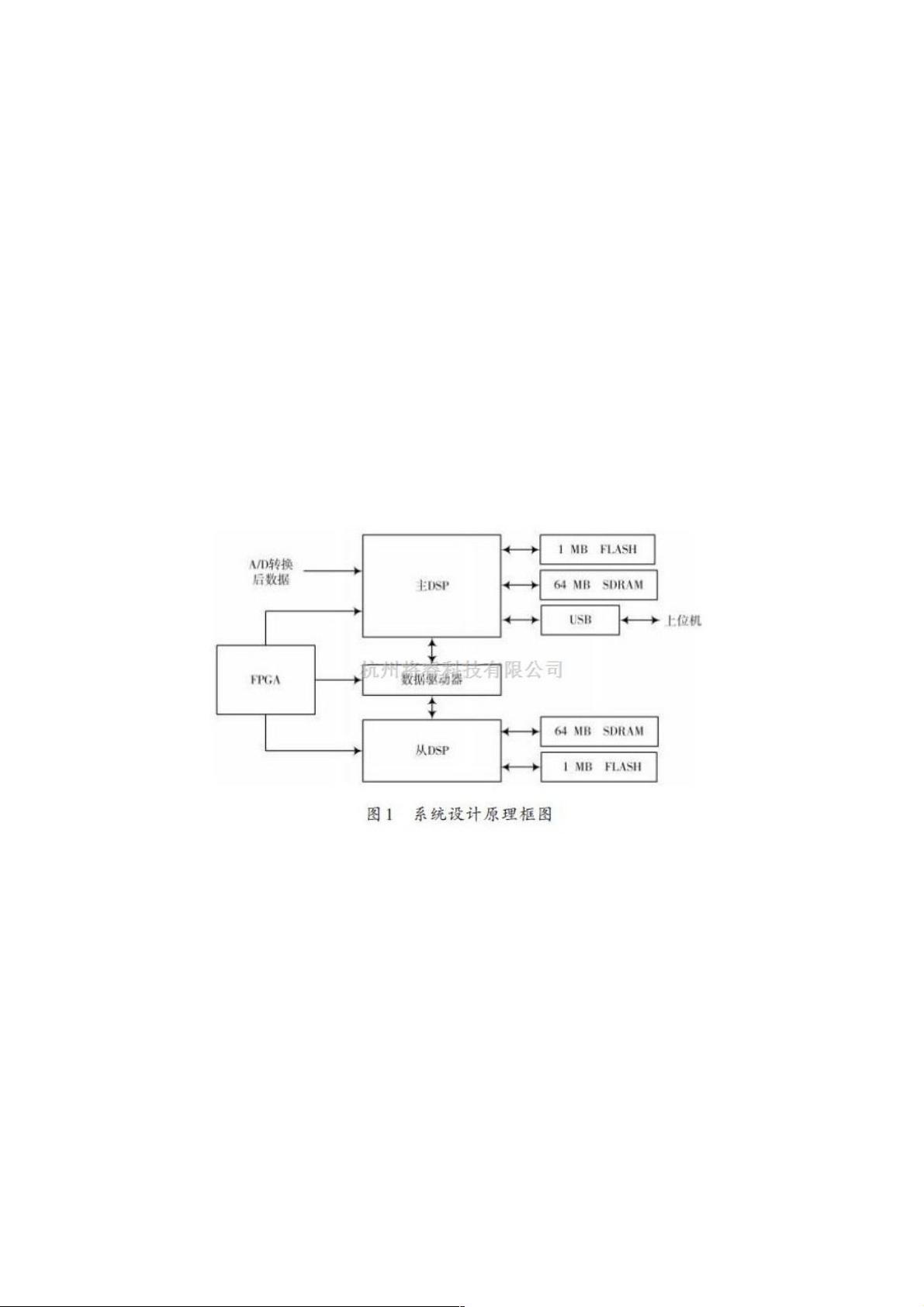
1 系统设计方案携带生命信息的雷达回波信号经过A/D 转换器转换成数字信号,实时处理系统对该数字信号进行生命特征
分析处理,提取出人体生命信息,并对结果进行上报.基本功能分为数据存储.生命信息实时处理.结果上传等.系统框图如图1所
示.
系统以两片DSP TMS320C6713B 为核心,由FPGA配合完成数据采集处理工作.
主DSP芯片负责与上位机和从DSP进行通信,用于完成数据存储.预处理和结果上传.通过USB接口接收上位机命令参数,
通过多通道缓冲接口接收A/D转换后的数据,并将数据存储在外部扩展空间,在内部进行体动信号检测与静目标的预处理,同
时将提取的体动位置信息和静目标识别结果通过USB 接口传至上位机;从DSP 通过HPI口接收主DSP 发送的相关参数以及预
处理后的数据,进行静目标信息实时处理,完成生命特征的识别,判别生命体的位置信息,并将处理后得到的相对坐标通过
HPI口传送至主DSP.
FPGA完成系统的逻辑控制功能.
2 硬件设计和实现
2.1 主从DSP芯片选择
根据本系统设计中所处理数据量大,数据处理相关性高,硬件电路集成度高.体积小.功耗低和实时检测的要求以及
FFT.LMS 滤波等多种复杂算法的需要,实时处理系统必须具有强大的运算能力.单片DSP构成的信号处理系统难以满足需求,
选用两片TI 公司C6000系列高性能浮点DSPTMS320C6713B作为信号处理系统的开发平台,TMS320C6713B 是32 b 高性能
浮点信号处理器,在工作主频达300 MHz,双精度浮点乘法器运算速度可达600 MMACS.TMS320C6713B 采用改进的哈佛体系
结构,利用超长指令字(VLIW)实现指令级并行,具有双精度浮点运算能力,同时具有多通道缓冲接口(McBSP)和32 b 外
部存储器接口(EMIF),4 个CE空间,每个空间均可与SDRAM.SBSRAM 和异步外设实现无缝接口,主机接口(HPI)集成
在TMS320C6713B片内,主机通过HPI 模块能够直接访问DSP 的大部分存储空间.
2.2 外围电路设计
下载后可阅读完整内容,剩余3页未读,立即下载
相关推荐



weixin_38515362
- 粉丝: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 久度免费文件代存系统 v1.0:全技术领域源码分享
- 深入解析caseyjpaul.github.io的HTML结构
- HTML5视频播放器的实现与应用
- SSD7练习9完整答案解析
- 迅捷PDF完美转PPT技术:深度识别PDF内容
- 批量截取子网页工具:Python源码分享与使用指南
- Kotlin4You: 探索设计模式与架构概念
- 古典风格茶园茶叶酿制企业网站模板
- 多功能轻量级jquery tab选项卡插件使用教程
- 实现快速增量更新的jar包解决方案
- RabbitMQ消息队列安装及应用实战教程
- 简化操作:一键脚本调用截图工具使用指南
- XSJ流量积算仪控制与数显功能介绍
- Android平台下的AES加密与解密技术应用研究
- Место-响应式单页网站的项目实践
- Android完整聊天客户端演示与实践
