双卡尔曼滤波器追踪激光散斑位移技术
28 浏览量
更新于2024-08-27
收藏 201KB PDF 举报
"Tracking speckle displacement by double Kalman filtering" 是一种利用两个串联的卡尔曼滤波器来追踪激光散斑位移的技术。该技术由一个追踪时间域内散斑位移的卡尔曼滤波器和另一个追踪空间域内散斑位移的卡尔曼滤波器组成。时间域的卡尔曼滤波器为空间域的卡尔曼滤波器提供先验信息,而空间域的卡尔曼滤波器则为时间域的卡尔曼滤波器提供测量数据。
在卡尔曼滤波器理论中,这种串联结构是一种优化的追踪策略。时间域的卡尔曼滤波器能够估计散斑在连续帧间的移动趋势,而空间域的卡尔曼滤波器则更专注于精确定位每一帧中的散斑位置。通过分析先验信息对空间域卡尔曼滤波器估计的影响,可以提高追踪的准确性和稳定性。这种技术对于处理激光散斑的动态变化特别有用,因为散斑的运动通常受到多种因素(如振动、湍流等)的影响,导致其位移难以精确预测。
文章中提到,光学分析系统被建立起来验证了双重卡尔曼滤波器跟踪器在追踪激光散斑恒定位移时的能力。这表明,该方法可能适用于需要高精度位移测量的领域,例如实验力学、机器控制、速度测量以及电子元件封装等。激光散斑技术因其非接触、高速和高灵敏度的特点,在这些应用中扮演着重要角色。
OCIS代码(Optical Society of America的分类代码):030.6140(与激光散斑技术相关的主题)、070.6020(可能涉及光学测量或光学检测)、120.3940(可能与跟踪和瞄准技术相关)。这些代码反映了文章研究内容的领域和应用方向。
"Tracking speckle displacement by double Kalman filtering" 技术是结合了卡尔曼滤波理论与激光散斑技术的一种创新方法,旨在提高激光散斑位移追踪的准确性和鲁棒性,对于需要精确测量微小位移的科学和工程问题具有重要意义。
382 CHINESE OPTICS LETTERS / Vol. 4, No. 7 / July 10, 2006
Tracking speckle displacement by double Kalman filtering
Dongh ui Li (
üüü
ÞÞÞ
) and Li Guo (
)
Department of Electronic Science and Technology, University of Science and Technology of China, Heifei 230027
Received March 3, 2006
A tracking technique using two sequentially-connected Kalman filter for tracking laser speckle displacement
is presented. One Kalman filter tracks temporal speckle displacement, while another Kalman filter tracks
spatial speckle displacement. The temporal Kalman filter provides a prior for the spatial Kalman filter,
and the spatial Kalman filter provides measurements for the temporal Kalman filter. The contribution of
a prior to estimations of the spatial Kalman filter is analyzed. An optical analysis system was set up to
verify the double-Kalman-filter tracker’s ability of tracking laser speckle’s constant displacement.
OCIS codes: 030.6140, 070.6020, 120.3940.
Laser speckle technique
[1]
has wide-range applications
such as experimental mechanics, machine control, ve-
locimetry, electronic element package, and so on. Some of
these applications involve object motion tracking, which
estimates motion state evolution from noisy measure-
ments. Kalman filters
[2−4]
have been applied in ob-
ject tracking, such as maneuvering target tracking, for
a long time. In these object-tracking applications, mea-
surements or observations are available; however, object’s
motion states such as displacement, velocity and so on,
are unknown. The goal is to estimate states from noise-
contaminated measurements as accurately as possible.
Kalman filter, which represents the problem in time field
and state space, can obtain optimal estimation for linear-
Gaussian environment. For arbitrary statistics, Kalman
filter is the best linear estimator. Nonlinear problem
could be approximately solved through extended Kalman
filter
[5,6]
which involves a linearization process. Kalman
filter is recursively Bayesian in that it obtains a prior via
prediction process and then obtains posterior of states
via update process.
This paper presents a speckle tracker consisting of
two sequentially-connected Kalman filters. One of
them estimates speckle temporal displacement; another
Kalman filter estimates speckle spatial displacement.
The sequentially-constructed tracker guarantees that the
temporal Kalman filter provides initial parameter es-
timations for the spatial Kalman filter and the spa-
tial Kalman filter provides accurate measurements for
the temporal Kalman filter. Speckle displacement
could be figured out through such methods as least-
square
[7]
,interpolation
[8,9]
, fuzzy correlation
[10]
,andso
on. These methods, however, do not consider a prior
which could help improving estimation precision. The
double-Kalman-filter tracker considers motion dynam-
ics as Markov process and computes speckle displace-
ment through Kalman filtering. The double-Kalman-
filter tracker, thus, could track speckle displacement ac-
curately.
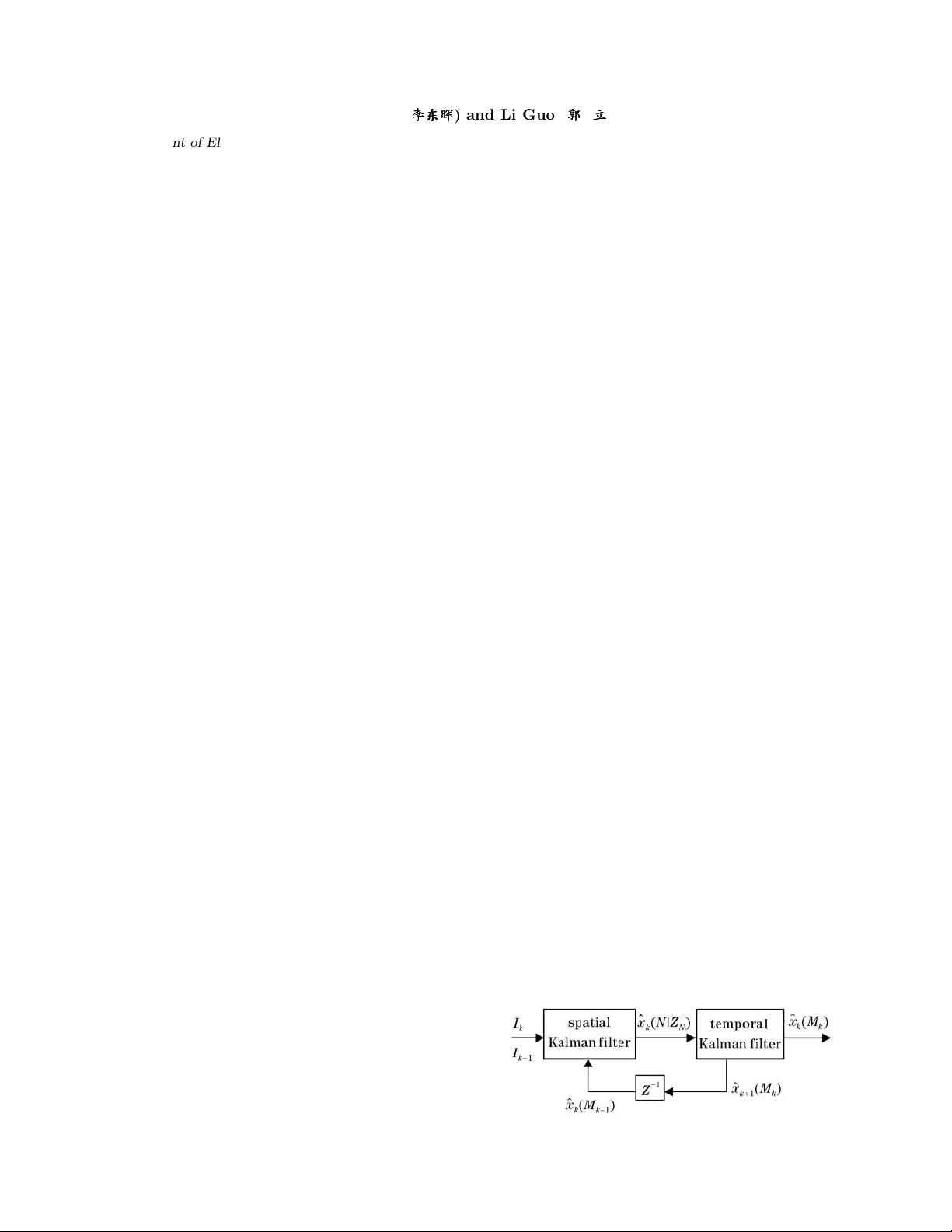
The double-Kalman-filter tracker is illustrated in Fig.
1. Speckle displacement in a subimage is estimated by
a maximum likelihood method. Speckle displacement in
whole image is estimated by the spatial Kalman filter
which makes use of subimage’s computation as measure-
ment. The spatial Kalman filter’s initial state is pro-
vided by prediction estimation produced by the tempo-
ral Kalman filter at the last time. The temporal Kalman
filter makes use of measurements provided by the spatial
Kalman filter to estimate speckle displacement at cur-
rent time. The tracker’s sequential structure makes sure
that one Kalman filter can utilize another Kalman filter’s
outputs for a good estimation of speckle displacement. In
Fig. 1, I
k
and I
k−1
are two speckle images fetched at dis-
crete time kT and (k − 1)T ,wherek ≥ 2andT is the
time interval. ˆx
k
(N|Z
N
) is the spatial Kalman filter’s
filtering output. ˆx
k
(M
k
)andˆx
k+1
(M
k
)arethetempo-
ral Kalman filter’s filtering output and prediction out-
put, respectively. Z
−1
denotes unit delay.
If I
1
denotes reference speckle image obtained before
object motion, I
2
denotes comparison speckle image ob-
tained after object motion, then I
1
and I
2
have the rela-
tionship as
I
1
(r)=I
2
(r + U ), (1)
I
1
(r − U )=I
2
(r), (2)
where r denotes the location of a pixel in the speckle
image, and U denotes speckle displacement vector. Dis-
placements at pixel r and its neighborhood Ω
r
could be
assumed a constant U.
Expanding Eqs. (1) and (2) into Taylor series and ne-
glecting the second and higher order components yield
I
1
(r)=I
2
(r)+∇I
2
(r) · U, (3)
I
2
(r)=I
1
(r) −∇I
1
(r) · U, (4)
where ∇I
1
(r)and∇I
2
(r) are spatial gradients of two
speckle images. Equations (3) and (4) can be rearranged
as
Fig. 1. Double-Kalman-filter tracker.
1671-7694/2006/070382-04 http://www.col.org.cn
下载后可阅读完整内容,剩余3页未读,立即下载
2022-01-28 上传
2009-06-25 上传
2019-12-12 上传
2022-07-15 上传
2010-06-09 上传
2019-12-12 上传
2021-02-09 上传
2021-02-22 上传
2019-03-23 上传

weixin_38703895
- 粉丝: 4
- 资源: 910
 我的内容管理
展开
我的内容管理
展开







最新资源
- 构建基于Django和Stripe的SaaS应用教程
- Symfony2框架打造的RESTful问答系统icare-server
- 蓝桥杯Python试题解析与答案题库
- Go语言实现NWA到WAV文件格式转换工具
- 基于Django的医患管理系统应用
- Jenkins工作流插件开发指南:支持Workflow Python模块
- Java红酒网站项目源码解析与系统开源介绍
- Underworld Exporter资产定义文件详解
- Java版Crash Bandicoot资源库:逆向工程与源码分享
- Spring Boot Starter 自动IP计数功能实现指南
- 我的世界牛顿物理学模组深入解析
- STM32单片机工程创建详解与模板应用
- GDG堪萨斯城代码实验室:离子与火力基地示例应用
- Android Capstone项目:实现Potlatch服务器与OAuth2.0认证
- Cbit类:简化计算封装与异步任务处理
- Java8兼容的FullContact API Java客户端库介绍
