基于S变换的VSC-HVDC电缆故障定位方法:利用电流频率成分
下载需积分: 10 | PDF格式 | 695KB |
更新于2024-07-17
| 21 浏览量 | 举报
本文档探讨了一种基于电压源转换器(VSC)的高压直流(VSC-HVDC)电缆的故障定位方法。该方法的独特之处在于它依赖于电缆中故障产生的电流频率成分,这种方法对于识别和定位故障点具有重要意义。传统的故障检测技术可能依赖于特定的信号处理工具,而在本文中,作者选择了斯特拉姆变换(S-Transform),这是一种时间-频率分析工具,相较于传统的傅立叶变换或小波变换,S-Transform在某些方面表现出更高的优越性,特别是在时频分辨率和信号处理效率上。
S-Transform是一种非线性分析方法,它能同时解析信号在时间和频率域的信息,这对于快速识别电缆中的故障特征至关重要。通过S-Transform,研究者能够捕捉到故障发生时电流波形中出现的瞬态频率成分,这些成分的出现时间和幅度变化与故障位置密切相关。论文提到的方法首先要求在VSC-HVDC电缆的两端记录下这些频率成分的到达时间,这可以通过电缆保护系统中的实时监测设备实现。
实施过程中,数据采集后,利用S-Transform对电缆电流进行分析,可以形成一个包含故障特征频率成分的时间-频率图像。通过对图像的比较和解析,能够精确地定位故障点,减少了因传统方法可能导致的误判或漏诊。此外,由于S-Transform的特性,这种方法对于高频噪声和瞬态事件的抑制能力较强,提高了故障定位的准确性。
这项研究为VSC-HVDC电缆系统的故障诊断提供了一个创新且实用的解决方案,有助于提高电力系统的稳定性和可靠性。通过结合S-Transform的技术优势,本文的工作不仅在理论上推动了电力系统故障检测领域的进步,也为实际工程应用提供了有效的技术支持。未来的研究可能进一步优化算法性能,或者考虑将其应用于更广泛的电力系统监控中。
Energies 2017, 10, 1115 3 of 15
22
2
2
2
1
0
1
0
[, ] [ ] , 0
1
[,0] [ ], 0
m
imk
N
nN
m
N
m
nmn
SkT X e e n
NT NT
m
SkT X n
NNT
π
π
−
−
=
−
=
+
=≠
==
(2)
where
,
,(0, 1)kmn N∈−
. N is the sampling number, and T is the sampling interval. X[n/NT] is the
discrete Fourier transform of x[jT], and
22 2
2/mn
e
π
−
is the Fourier spectrum of the Gaussian window
function.
As seen from Equation (2), the S transform result of a discrete signal is a complex matrix. A row
vector of the matrix represents the frequency-magnitude characteristic of the signal at a specific
moment, and the frequency interval is 1/NT, denoted by f0. A column vector represents the
time-magnitude characteristic of a frequency component with a specific frequency, and the time
interval is T. For example, we denote the S transform result by S, and S[k + 1, n + 1] represents the
frequency component with a frequency of nf0 at the time kT.
The wavelet transform provides a cogent math tool for transient signal analysis. However, the
wavelet transform results for a signal may be different under different wavelet bases and scales;
thus, it is imperative to select the proper wavelet basis and scale for a specific signal. The Fourier
transform has a window with a fixed height and width; thus, it cannot adjust the time–frequency
resolution with variations of the time and frequency. The S transform inherits the advantages of the
wavelet transform and the Fourier transform, and can overcome both of their shortcomings. The S
transform is perfectly reversible. The phase of the S transform referenced to the time origin provides
useful and supplementary information regarding spectra that is not available from locally
referenced phase information in the wavelet transform [16]. By means of the S transform, all the
frequency components with a frequency interval of f0 can be extracted, and the proper frequency
components can be selected conveniently. Additionally, the S transform results are more intuitive
than the wavelet transform results, which will be discussed in detail in Subsection 5.7. The height
and width of the Gaussian window can change with a variation of the frequency; thus, the S
transform can adjust its time and frequency resolution ability with respect to the frequency.
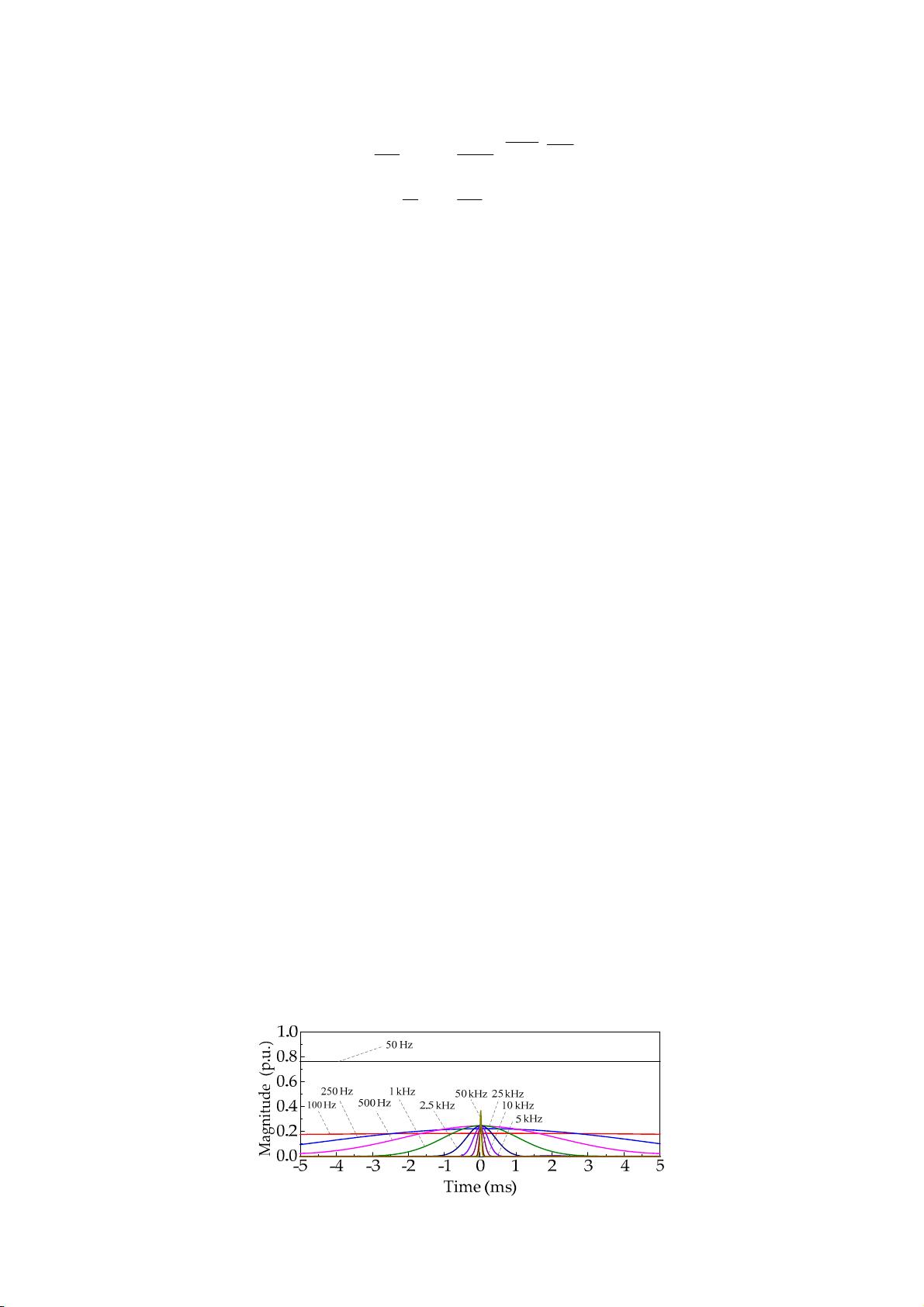
In this paper, the S transform was realized by means of matrix laboratory (MATLAB). We take
a series of signals that contained fault data at 0 ms as an example. The frequency components of the
signal were extracted by the S transform, and the time-magnitude curves of some typical frequency
components are shown in Figure 1. As can be seen, when the frequency is lower than 500 Hz, the
time-magnitude curves of the frequency components are smooth, but they are different from each
other. This indicates that, in the low-frequency range, the frequency resolution ability of the S
transform is remarkable, whereas the time resolution ability is not very good. When the frequency
is greater than 2.5 kHz, the time-magnitude curves are concentrated at the fault time; thus, the
transient fault signal can be represented intuitively. This indicates that the time resolution ability of
the S transform is improved in the high-frequency range. For fault identification and location, a
good time resolution ability is more critical. Therefore, due to the satisfactory time resolution ability
of the S transform in the high-frequency range, the high-frequency components were employed for
fault location in this paper.
剩余14页未读,继续阅读
相关推荐

1993 浏览量

166 浏览量
561 浏览量


210 浏览量

sinat_36598375
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- Verilog实现的Xilinx序列检测器设计教程
- 九度智能SEO优化软件新版发布,提升搜索引擎排名
- EssentialPIM Pro v11.0 便携修改版:全面个人信息管理与同步
- C#源代码的恶作剧外表答题器程序教程
- Weblogic集群配置与优化及常见问题解决方案
- Harvard Dataverse数据的Python Flask API教程
- DNS域名批量解析工具v1.31:功能提升与日志更新
- JavaScript前台表单验证技巧与实例解析
- FLAC二次开发实用论文资料汇总
- JavaScript项目开发实践:Front-Projeto-Final-PS-2019.2解析
- 76云保姆:迅雷云点播免费自动升级体验
- Android SQLite数据库增删改查操作详解
- HTML/CSS/JS基础模板:经典篮球学习项目
- 粒子群算法优化GARVER-6直流配网规划
- Windows版jemalloc内存分配器发布
- 实用强大QQ机器人,你值得拥有
