互补滤波法解析:飞行器姿态解算与IMU技术
版权申诉
64 浏览量
更新于2024-08-24
收藏 254KB PDF 举报
本资源主要探讨的是飞行器姿态解算中的关键技术,以基于互补滤波的方法为核心。姿态解算在无人机、自动驾驶等领域至关重要,它涉及到如何准确地确定飞行器在三维空间中的位置和方向。姿态通常用矩阵、轴角、欧拉角和四元数等多种方式表示。
核心部分聚焦于惯性测量单元(IMU),如MPU6050芯片,该芯片内置陀螺仪和加速度计,分别用于测量三轴的角速度和加速度。原始传感器数据往往受到噪声干扰,因此必须通过滤波算法进行处理,以提高数据的精度。非线性互补滤波算法、卡尔曼滤波算法以及Mahony互补滤波算法都是常用的滤波方法。
加速度计是IMU的重要组成部分,它能够测量加速度,包括重力加速度。在静止或匀速运动时,加速度计可以用来计算出与地面的相对角度,如横滚角和俯仰角。然而,当飞行器做变速运动时,加速度计的输出会受到外力影响,此时就需要陀螺仪来辅助。
陀螺仪的作用在于测量角速度,其工作原理是检测每个轴的旋转角,从而推算出飞行器的转动状态。通过陀螺仪的输出,可以计算出飞行器在不同平面上的旋转角度变化率。数字加速度计和模拟加速度计是常见的类型,前者通过I2C、SPI或USART接口获取数据,后者则输出模拟电压,需通过ADC转换为数字值。
姿态解算涉及飞行器的姿态估计技术,特别是利用互补滤波算法处理来自IMU的加速度和角速度数据,结合加速度计和陀螺仪的工作原理,实现对飞行器运动状态的精确监控。这个领域对于保证飞行器稳定性和导航准确性具有重要意义。
。
精选资料,欢迎下载
姿态解算
一、主线
姿态表示方式: 矩阵表示,轴角表示,欧拉角表示,四元数表示。
惯性测量单元 IMU(Inertial Measurement Unit ):MPU6050芯片,包含陀螺仪和加速
度计,分别测量三轴加速度和三轴角速度。 注意,传感器所测数据是原始数据, 包含了噪声,
无法直接用于飞行器的姿态解算,因此需要对数据进行滤波。
滤波算法: 非线性互补滤波算法,卡尔曼滤波算法, Mahony互补滤波算法。
二、知识点补充
加速度计和陀螺仪
加速度计:加速度计 , 可以测量加速度 , 包括外力加速度和重力加速度 , 因此,当被测物
体在静止或匀速运动 (匀速直线运动) 的时候 , 加速度计仅仅测量的是重力加速度 , 而重力加
速度与
R
坐标系(绝对坐标系)是固连的 , 通过这种关系 , 可以得到加速度计所在平面与地
面 的角度关系 也就是横滚角和俯仰角。 把加速度传感器水平静止放在桌子上, 它的 Z轴输
出的是 1g 的加速度。因为它 Z 轴方向被重力向下拉出了一个形变。可惜的是,加速度传感
器不会区分重力加速度与外力加速度。 所以, 当系统在三维空间做变速运动时, 它的输出就
不正确了,或者说它的输出不能表明物体的姿态和运动状态。
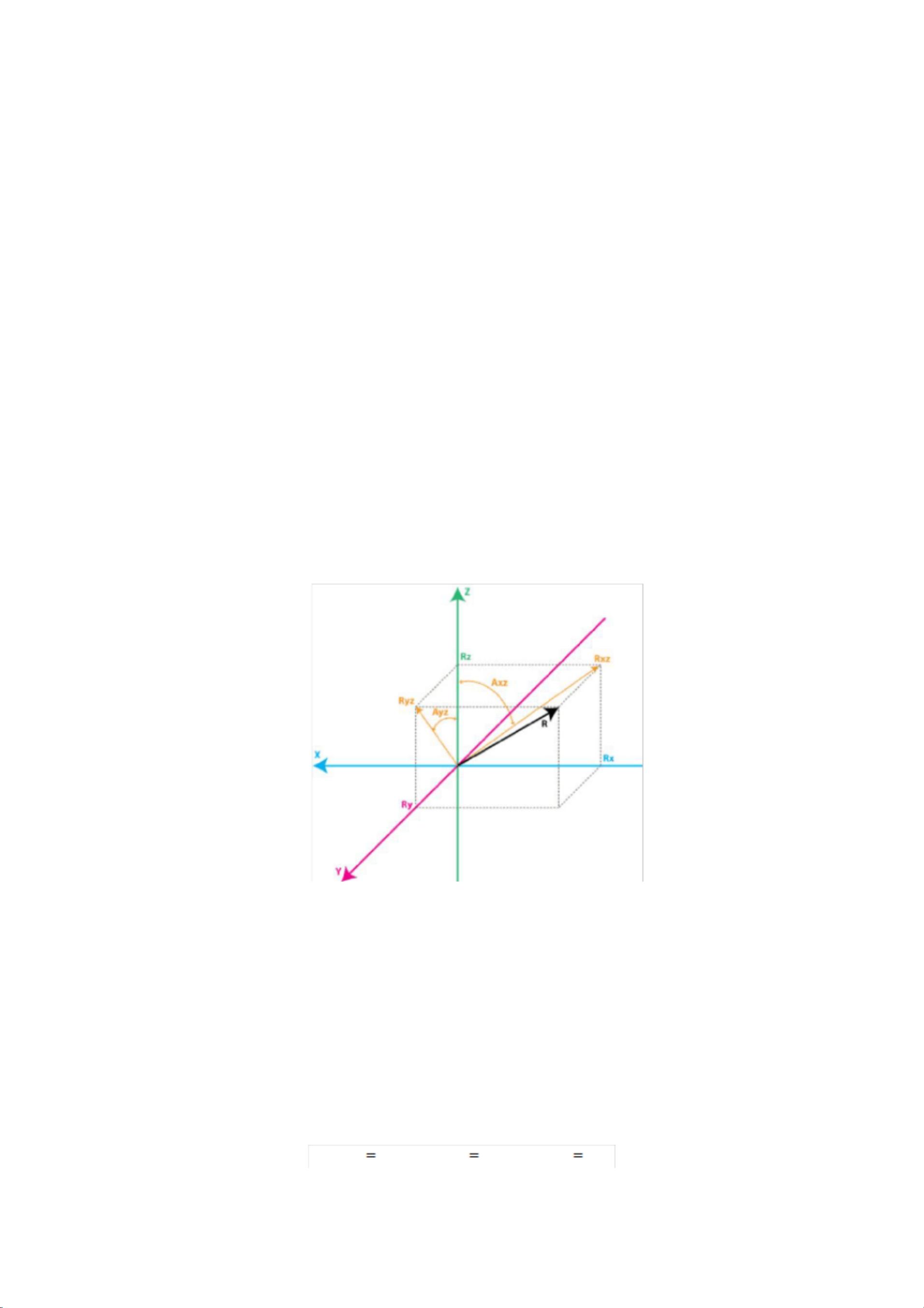
陀螺仪: 陀螺仪测量角速度。 陀螺仪模型如图 1 所示, 陀螺仪的每个通道检测一个轴的
旋转。
图 1
[ 引自网络 ]
上图中, Rxz 是 R在 XZ面上的投影, 与 Z 轴的夹角为 Axz。Ryz 是 R 在 ZY 面上的投影,
与 Z 轴的夹角为 Ayz。陀螺仪就是测量上面定义角度的变化率,换句话说,它会输出一个与
上面这些角度变化率线性相关的值。
加速度计工作原理介绍(摘自网络)
大多数加速度计可归为两类:数字和模拟。数字加速度计可通过 I2C,SPI 或 USART方
式获取信息,而模拟加速度计的输出是一个在预定范围内的电压值,你需要用 ADC(模拟量
转数字量) 模块将其转换为数字值。 不管使用什么类型的 ADC模块, 都会得到一个在一定范
围内的数值。例如一个 10 位 ADC模块的输出值范围在 0-1023 间。假设我们从 10 位 ADC模
块得到了以下的三个轴的数据:
586, 630, 561AdcRx AdcRy AdcRz
下载后可阅读完整内容,剩余7页未读,立即下载
101 浏览量
2021-06-26 上传
2021-09-08 上传
2021-06-27 上传
2021-09-25 上传
2021-09-25 上传
2021-11-02 上传
2015-11-17 上传
150 浏览量

moneygaojia
- 粉丝: 0
- 资源: 4万+
 我的内容管理
展开
我的内容管理
展开







