西门子PLC与川崎机器人PROFINET通信配置指南
需积分: 5 127 浏览量
更新于2024-07-15
收藏 3.75MB DOCX 举报
"该文档是关于如何设置川崎机器人与西门子S1200/S1500 PLC通过PROFINET总线通信的详细教程。内容包括硬件安装、TIAPortal软件配置以及地址设置等步骤。"
本文档详细阐述了如何实现川崎机器人与西门子S1200/S1500系列PLC之间的PROFINET总线通信,这对于自动化生产线或工业控制系统集成至关重要。首先,讲解了硬件安装部分,需要准备的工具有十字螺丝刀、1TJ板卡(PROFINET母板)、从站板卡、接地线和工业级网线。具体步骤包括将PROFINET从站板卡接入1TJ母板,将其安装到机器人控制柜,并连接地线和网线。
接下来是软件配置部分,主要在TIAPortal软件中进行。首先新建工程并导入PLC,然后导入川崎机器人的GSD文件(50999-0061)以识别从站设备。在管理通用站描述文件(GSD)中选择相应的XML文件进行安装。安装成功后,更新硬件目录,接着在设备和网络中添加从站设备。在“网络视图”中找到并添加Anybus-SPRT目录下的PROFINET IO模块,将其拖入网络视图并配置地址。
特别需要注意的是,川崎机器人的IO配置是以16个IO(1个word/2个byte)为一组,因此在添加输入/输出模块时,数量必须是2的倍数,以避免出现问题。例如,要配置32个IN/OUT,就需要添加一个InputOutput004bytes模块。
最后,文档提到了地址更改的重要性,特别是当PLC已有多个从站时,可能需要调整某些模块的起始地址以避免冲突。这一步骤涉及对新增模块的地址进行定制,以确保它们不与PLC的其他功能重叠。
这份教程提供了清晰的步骤来指导用户完成川崎机器人与西门子PLC的PROFINET通信设置,这对于实现自动化系统中的数据交换和设备控制至关重要。通过遵循这些步骤,用户能够有效地整合这两个系统的网络连接,提高生产效率和系统可靠性。
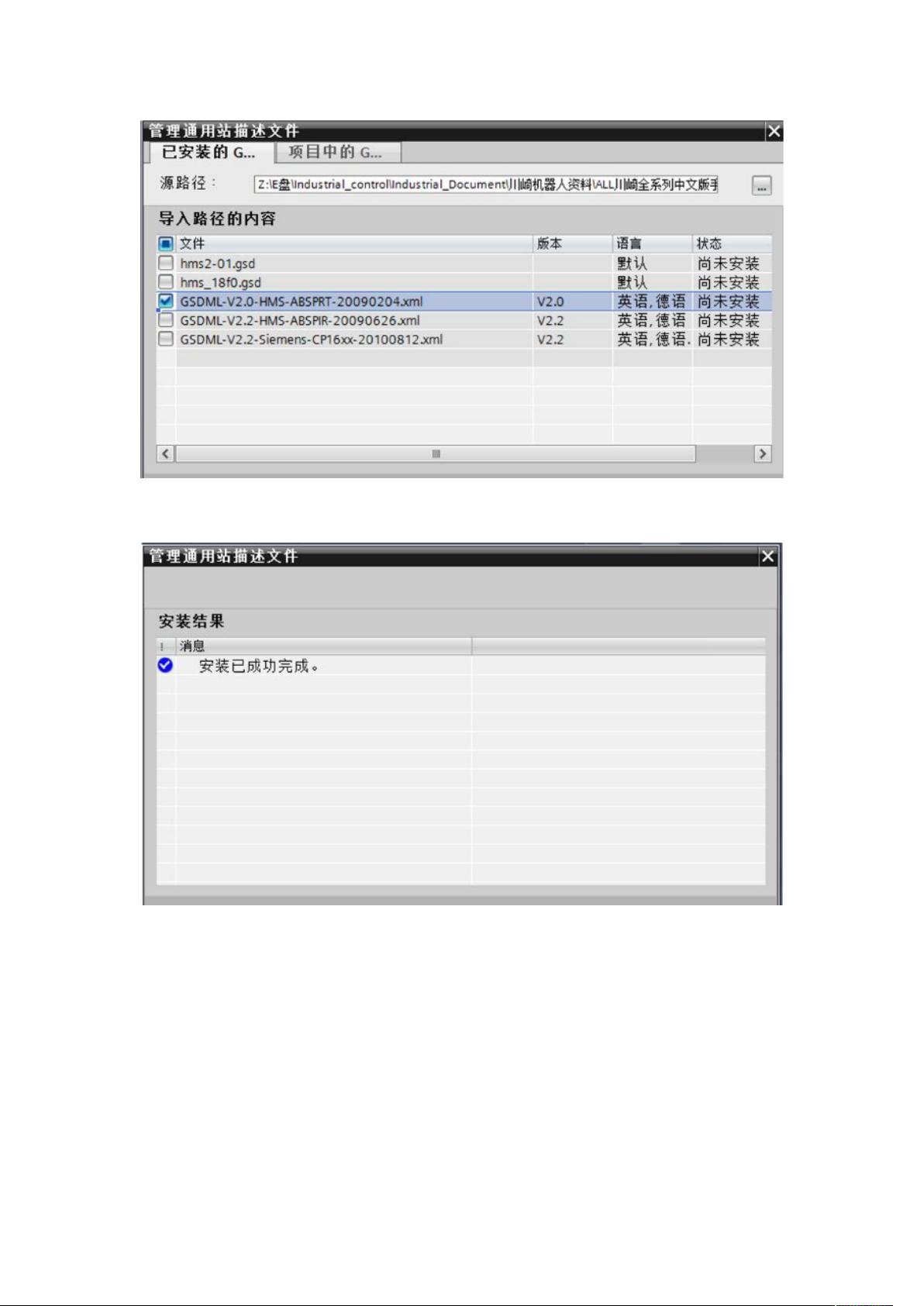
6.显示安装已成功完成,点击关闭按钮
7、等待硬件目录更新完成.更新完成后关闭此窗口,GSD 文件安装完毕
剩余24页未读,继续阅读
2014-12-04 上传
2019-08-29 上传
2019-04-22 上传
2023-04-06 上传
2024-05-07 上传
2021-11-25 上传
2022-06-30 上传

yzl1990123
- 粉丝: 13
- 资源: 17
 我的内容管理
展开
我的内容管理
展开







最新资源
- 构建基于Django和Stripe的SaaS应用教程
- Symfony2框架打造的RESTful问答系统icare-server
- 蓝桥杯Python试题解析与答案题库
- Go语言实现NWA到WAV文件格式转换工具
- 基于Django的医患管理系统应用
- Jenkins工作流插件开发指南:支持Workflow Python模块
- Java红酒网站项目源码解析与系统开源介绍
- Underworld Exporter资产定义文件详解
- Java版Crash Bandicoot资源库:逆向工程与源码分享
- Spring Boot Starter 自动IP计数功能实现指南
- 我的世界牛顿物理学模组深入解析
- STM32单片机工程创建详解与模板应用
- GDG堪萨斯城代码实验室:离子与火力基地示例应用
- Android Capstone项目:实现Potlatch服务器与OAuth2.0认证
- Cbit类:简化计算封装与异步任务处理
- Java8兼容的FullContact API Java客户端库介绍
