算法设计手册:实用算法设计与分析
下载需积分: 41 | PDF格式 | 3.89MB |
更新于2024-07-26
| 103 浏览量 | 举报
"The Algorithm Design Manual" 是一本由Steven S. Skiena编写的经典书籍,主要探讨算法设计和分析的实践方法。这本书的第二版详细介绍了如何设计和评估算法,适用于程序员、面试准备者以及对算法感兴趣的读者。
该书分为多个章节,详细讲解了算法设计的关键概念和技术。第一章“Introduction to Algorithm Design”引入了算法设计的基本思想,通过实例如Robot Tour Optimization和Selecting the Right Jobs来展示问题解决策略,并讨论了正确性证明、问题建模和“战争故事”(实际应用案例)的重要性。
第二章“Algorithm Analysis”讲解了计算模型,特别是RAM模型,以及大O表示法,用于描述算法的时间复杂度。它还涵盖了增长率、效率推理、对数运算及其应用,以及对金字塔建造之谜的战争故事,进一步阐述了高级分析技巧。
第三章“Data Structures”介绍了不同数据结构,如连续与链式结构的对比,栈、队列、字典、二叉搜索树、优先队列、哈希表和字符串处理,以及它们在解决特定问题中的应用。
第四章“Sorting and Searching”讨论了排序和查找算法,包括排序的应用、堆排序、归并排序、快速排序、分布排序等,以及二分搜索和分治策略。通过战争故事展示了这些算法在实际场景中的应用,如机票预订系统。
第五章“Graph Traversal”深入探讨了图论,包括图的类型、数据结构、广度优先搜索和深度优先搜索,以及它们在路径查找、最短路径计算等方面的应用。
这本书不仅提供了理论知识,还包含大量实际问题的案例分析和练习题,有助于读者巩固理解并提升算法设计能力。对于想要提高编程技能或准备技术面试的人来说,是一份宝贵的资源。
4 1. INTRODUCTION TO ALGORITHM DESIGN
I N S E R T I O N S O R TI N S E R T I O N S O R T
I N S E R T I O N S O R T
I N S E R T I O N S O R T
E I N S R T I O N S O R TE I N S R T I O N S O R T
E I N R S T I O N S O R T
E I N R S T I O N S O R TE I N R S T I O N S O R T
E I I N R S T O N S O R T
E I I N O R S T N S O R TE I I N O R S T N S O R T
E I I N N O R S T S O R TE I I N N O R S T S O R T
E I I N N O R S S T O R TE I I N N O R S S T O R T
E I I
N
N
O
O
R R
S
S
T T
E I I N N O O R S S T R T
E I I N N O O R R S S T T
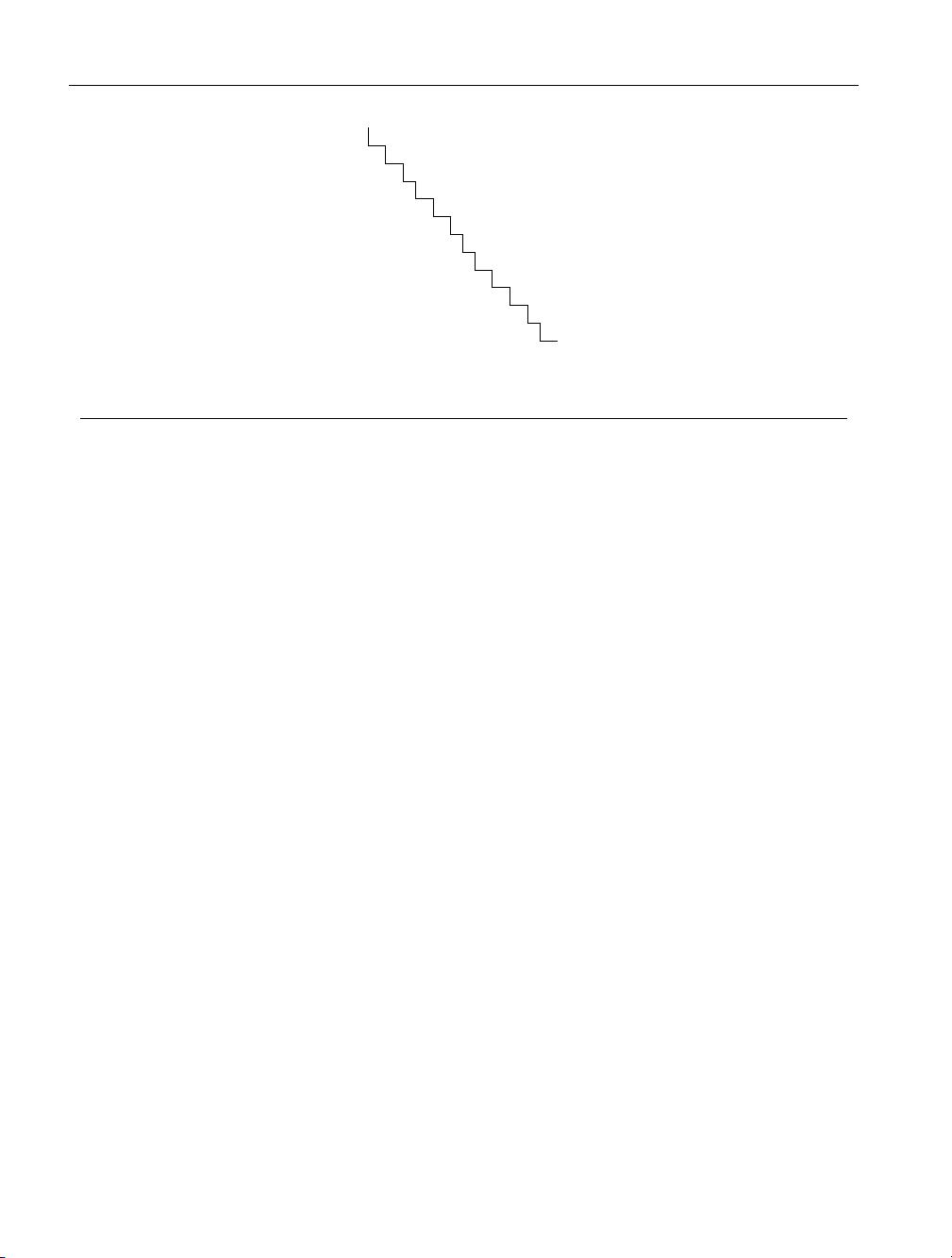
Figure 1.1: Animation of insertion sort in action (time flows down)
insertion_sort(item s[], int n)
{
int i,j; /* counters */
for (i=1; i<n; i++) {
j=i;
while ((j>0) && (s[j] < s[j-1])) {
swap(&s[j],&s[j-1]);
j = j-1;
}
}
}
An animation of the logical flow of this algorithm on a particular instance (the
letters in the word “INSERTIONSORT”) is given in Figure 1.1
Note the generality of this algorithm. It works just as well on names as it does
on numbers, given the appropriate comparison operation (<) to test which of the
two keys should appear first in sorted order. It can be readily verified that this
algorithm correctly orders every possible input instance according to our definition
of the sorting problem.
There are three desirable properties for a good algorithm. We seek algorithms
that are correct and efficient, while being easy to implement. These goals may not
be simultaneously achievable. In industrial settings, any program that seems to
give good enough answers without slowing the application down is often acceptable,
regardless of whether a better algorithm exists. The issue of finding the best possible
answer or achieving maximum efficiency usually arises in industry only after serious
performance or legal troubles.
In this chapter, we will focus on the issues of algorithm correctness, and defer a
discussion of efficiency concerns to Chapter 2. It is seldom obvious whether a given

剩余738页未读,继续阅读
相关推荐





JillLiang
- 粉丝: 22
 我的内容管理
展开
我的内容管理
展开







最新资源
- Eclipse IDE基础教程:从入门到精通
- 设计模式入门:编程艺术的四大发明——可维护与复用
- Java正则表达式基础与Jakarta-ORO库应用
- 实战EJB:从入门到精通
- PetShop4.0架构解析与工厂模式应用
- Linux Vi命令速查与操作指南
- Apriori算法:挖掘关联规则的新方法与优化
- ARM9嵌入式WinCE 4.2移植实战教程
- ISO9000-2000质量管理体系标准解析
- ASP.NET 实现无限级分类TreeView教程
- 微软解决方案框架MSF:基本原理与团队模型解析
- 项目绩效考核:误区、方法与挑战
- C++数据结构与算法习题答案详解
- C语言编程实践:经典案例与算法解析
- 探索55个Google奇趣玩法,乐在其中
- JSF:Java构建高效Web界面的新技术
