STM32 Bootloader的CAN协议详解及命令集
需积分: 11 62 浏览量
更新于2024-07-16
收藏 680KB PDF 举报
本文档是STM32微控制器bootloader应用笔记AN3154 Rev7,主要关注CAN(Controller Area Network)协议在STM32系列微控制器中的应用。该协议被用于bootloader版本V3.x、V7.x和V9.x,这些版本适用于STM32微控制器系统内存启动模式,可以在STM32官方网站www.st.com的AN2606文档中找到相关说明。
STM32产品系列包括F1、F2、F4、F7和L4,文档详细描述了bootloader中的命令序列及其功能。以下是部分内容的解读:
1. **Bootloader代码顺序**:这部分可能介绍了bootloader启动时执行的一系列操作流程,从接收到CAN消息开始,到后续的命令处理和设备操作,确保正确引导微控制器进入用户模式。
2. **CAN设置**:这部分涉及bootloader如何配置CAN模块,包括波特率、错误检测模式、仲裁段和滤波器设置等,确保数据通信的可靠性和有效性。
3. **Bootloader命令集**:
- **Get命令**:允许上位机查询设备的状态或信息,如系统版本、硬件配置等。
- **GetVersion & ReadProtectionStatus命令**:获取设备固件版本和读保护状态,以便于升级管理和权限管理。
- **GetID命令**:识别设备的身份,通常用于设备配对或确认设备类型。
- **Speed command**:设置或调整CAN通信的波特率,以适应不同的通信需求。
- **ReadMemory命令**:允许上位机读取设备内部存储器的内容,常用于固件更新或诊断。
- **Go command**:可能是执行特定操作的命令,如跳转到某个地址开始执行代码,或者从用户模式返回到bootloader模式。
4. **适用产品列表**:文档列出了支持该bootloader协议的具体STM32微控制器型号,方便开发者根据需要选择合适的硬件平台。
总结来说,本文档提供了STM32微控制器中CAN协议在bootloader中的具体实现,包括其工作原理、配置细节以及与上位机交互的命令结构,为开发人员理解和使用这些设备的bootloader提供了重要的参考。通过阅读和理解这份文档,开发人员可以有效地管理和控制STM32微控制器,确保软件更新和系统维护的顺利进行。
Bootloader code sequence AN3154
6/33 AN3154 Rev 7
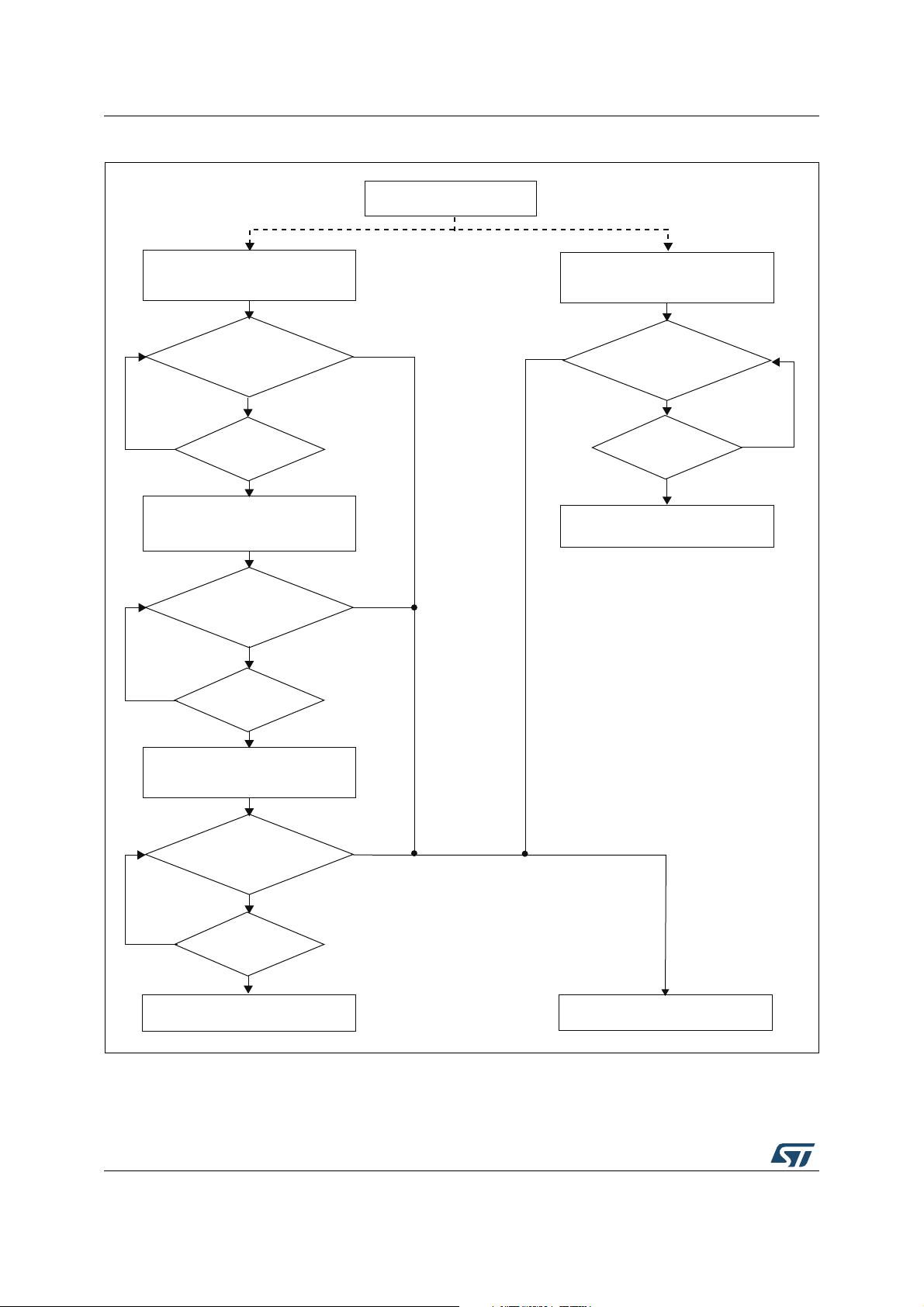
Figure 2. Check HSE frequency
1. For some devices the HSE frequency is calculated using HSI oscillator connected to a timer. For other
devices this measurement is not implemented. For the devices without HSE frequency measurement, only
the flow represented on the left is executed, while for the devices with HSE frequency measurement only
the flow on the right is executed. To know the flow for the used device refer to AN2606.
Start check HSE frequency
Configure external Oscillator mode
(System Clock = 60 MHz)
Initialize timeout at ~3 ms
Generate System Reset
Enter an infinite loop, waiting for any
CAN bootloader command
.
Configure CAN baudrate at 125 Kbps
Assuming that HSE = 8 MHz
Initialize timeout at ~1.5 ms
Message
received with stdID=0x79
and without frame error?
Yes
No
No
Configure CAN baudrate at 125Kbps
Assuming that HSE = 25MHz
Initialize timeout at ~1.5 ms
Message
received with stdID=0x79
and without frame error
?
Yes
No
No
Configure CAN baudrate at 125Kbps
Assuming that HSE = 14.7456MHz
Initialize timeout at ~1.5 ms
Message
received with stdID=0x79
and without frame error
?
Yes
No
HSE measured with HSI
and Timer
(1)
No HSE measurement
(1)
Message
received with stdID=0x79
and without frame error
?
Yes
Yes
No
Generate System Reset
ai15704c
Decrement timeout
Timeout = 0x0 ?
Decrement timeout
Timeout = 0x0 ?
Decrement timeout
Timeout = 0x0 ?
Yes
Yes
Yes
No
Decrement timeout
Timeout=0x0?
No
剩余32页未读,继续阅读
2018-06-11 上传
2010-10-27 上传
2020-09-16 上传
2020-08-08 上传
2021-08-07 上传
2021-01-30 上传
2019-06-23 上传
2022-09-21 上传

playeboy
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- zlib-1.2.12压缩包解析与技术要点
- 微信小程序滑动选项卡源码模版发布
- Unity虚拟人物唇同步插件Oculus Lipsync介绍
- Nginx 1.18.0版本WinSW自动安装与管理指南
- Java Swing和JDBC实现的ATM系统源码解析
- 掌握Spark Streaming与Maven集成的分布式大数据处理
- 深入学习推荐系统:教程、案例与项目实践
- Web开发者必备的取色工具软件介绍
- C语言实现李春葆数据结构实验程序
- 超市管理系统开发:asp+SQL Server 2005实战
- Redis伪集群搭建教程与实践
- 掌握网络活动细节:Wireshark v3.6.3网络嗅探工具详解
- 全面掌握美赛:建模、分析与编程实现教程
- Java图书馆系统完整项目源码及SQL文件解析
- PCtoLCD2002软件:高效图片和字符取模转换
- Java开发的体育赛事在线购票系统源码分析
