模糊自适应PID控制器在气液增力缸压力控制中的高效应用
需积分: 10 8 浏览量
更新于2024-08-11
收藏 246KB PDF 举报
"该文探讨了模糊自适应PID控制器在气液增力缸压力控制中的应用,旨在提高输出压力精度并提升系统一致性和稳定性。通过气动伺服系统的建模,得出比例阀控制气液增力伺服系统的数学模型,并利用模糊自适应控制原理,实现了PID参数的实时自整定。通过系统仿真,表明该方法可显著提高控制精度。"
在气液增力缸的压力控制中,传统的PID控制器虽然广泛应用,但在应对复杂动态环境时可能无法达到理想的控制效果。为了解决这个问题,文章提出了一种结合模糊逻辑和自适应控制理论的模糊自适应PID控制器。模糊逻辑在这里主要用于处理不确定性,自适应控制则允许控制器根据系统的实时性能调整PID参数,以实现最优控制。
首先,作者从气动伺服系统的角度出发,通过建模分析,推导出比例阀控制气液增力伺服系统的数学模型。这个模型是理解系统动态行为的基础,也是设计控制器的关键步骤。
接下来,模糊自适应PID控制器的设计采用了离线生成控制查询表的方式。这种方式允许在设计阶段就预先计算出各种可能工况下的最优PID参数,然后在实际运行时通过在线查询这些参数,确保控制器能够快速适应系统的变化,实现自整定。
通过建立气液增力缸压力控制的仿真模型,对比常规PID控制,模糊自适应PID控制器展现出更优的稳态和动态特性。这表明,新控制器能更好地抑制压力波动,提高输出压力的精度,同时增强系统的稳定性和一致性。
文章的关键词包括气液增力缸、PID控制器、模糊自适应和压力控制,表明其主要研究内容集中在这些领域。文献分类号TP273+.3属于自动化技术的范畴,文献标志码A表示这是一篇具有原创性研究成果的学术论文。
该研究为提高气液增力缸的控制性能提供了一个创新的解决方案,对于工业生产中需要高精度压力控制的场合具有重要的实践意义。通过模糊自适应PID控制,能够在不确定性和动态变化的环境中实现更高效、更稳定的气液增力缸压力控制。
2013-08
32(8)
真正
a
曲'化
Ordnance
Industry
Automation
doi: IO.7690/bgzdh.2013.08.020
模糊自适应
PID
在气液增力缸压力控制中的应用
张向南,周丽娟,李全俊
(中国兵器工业第五八研究所弹药自动装药研究应用中心,四川绵阳
621000)
•
71
•
摘要:为提高气液增力缸的输出压力精度并增强系统的一效性和稳定性,设计一种模糊自适应
PID
控制器。根据
气动伺服系统的建模推导出比例阅控制气液增力伺服系统的数学模型,并结合模糊自适应控制原理,以离线生成控制
查询表在线查询的方式,实现实时自整定
PID
参数。通过建立系统仿真模型,得到比常规
PID
控制更好的稳态和动态
特性的控制系统。仿真结果证明,该方法可以大大地提高气液增力缸在压力控制中的控制精度。
关键词:气液增力缸
PID
控制器;模糊自适应;压力
申图分类号
TP273+
.3
文献标志码
A
Application
of
Adaptive Fuzzy-PID for Controlling
ofPressure
in
Pneumatic-Hydraulic Intensifier
Zhang
Xiangnan
,
Zhou
Lijuan
,
Li
Quanjun
(Research & Application Center
for
Ammunition Automatic Charging & Assembly, No. 58 Research Institute
ofChina
Ordnance Industries, Mianyang 621000, China)
Abstract:
For improving accuracy
of
output pressure and enhancing the uniformity and stability
of
the pneumatic-
hydraulic intensifying cylinder
, design a controller
of
adaptive fuzzy PID. According to the model
of
the pneumatic servo
system
, derive to the mathematic model
of
proportional valve control pneumatic-hydraulic servo system. Combine with the
theory
of
adaptive fuzzy PID, based on generating polling list off-line and on-line inquires, realize the real-time auto-
setting PID parameter. Through establish system simulation model
, compared with regular PID, achieve a better system
with stationary state and dynamic response characteristic. The simulation results prove that the method can greatly improve
control accuracy
of
pneumatic-hydraulic
intensi
马
ring
cylinder.
Key
words:
pneumatic-hydraulic intensifier; PID controller; fuzzy adaptive; pressure
。
引言
气液增力技术结合了液压和气动技术的优点,
在自动化领域得到广泛应用,对气液增力装置进行
输出压力控制的研究有重要的现实意义
[1)
。目前我
国对气液增力缸压力的控制大都采用开环、机械限
位或定气压控制手段,导致输出压力精度不高,影
响气液增力缸使用过程中的鲁棒性和稳定性
[2)
。在
工业生产中,气液增力缸不同程度上存在纯滞后、
非线性、参数不确定等特性,传统的
PID
控制器采
用实验加试凑的方法,不仅需要熟练的技巧,往往
费时费力,而且没有"自适应"能力,只能依靠人
工重新整定参数。有文献提出用
Smith
预估器补偿
方法,从理论上可以解决纯滞后问题,但由于其对
模型误差十分敏感,对过程动态特性的精确度要求
较高,并不适合所有的实际生产情况,因此在-定
的条件下不采用补偿的方式反而控制效果更好。
基于此,笔者采用自适应局部参数自调整方
式,并通过模糊控制来实现自调整。由于模糊控制
收稿日期
2013-02-25
;修回日期
2012-03
一
12
对非线性以及参数不确定的控制对象来说有较好的
品质,在线自动调整
PID
参数,改善了系统的动态
性能,减少超调量和系统的调节时间
[3]
,还可以根
据不同用户的不同需求,离线调整查询表值,从而
具有很好的推广应用价值
[3)
。
1
系统建模
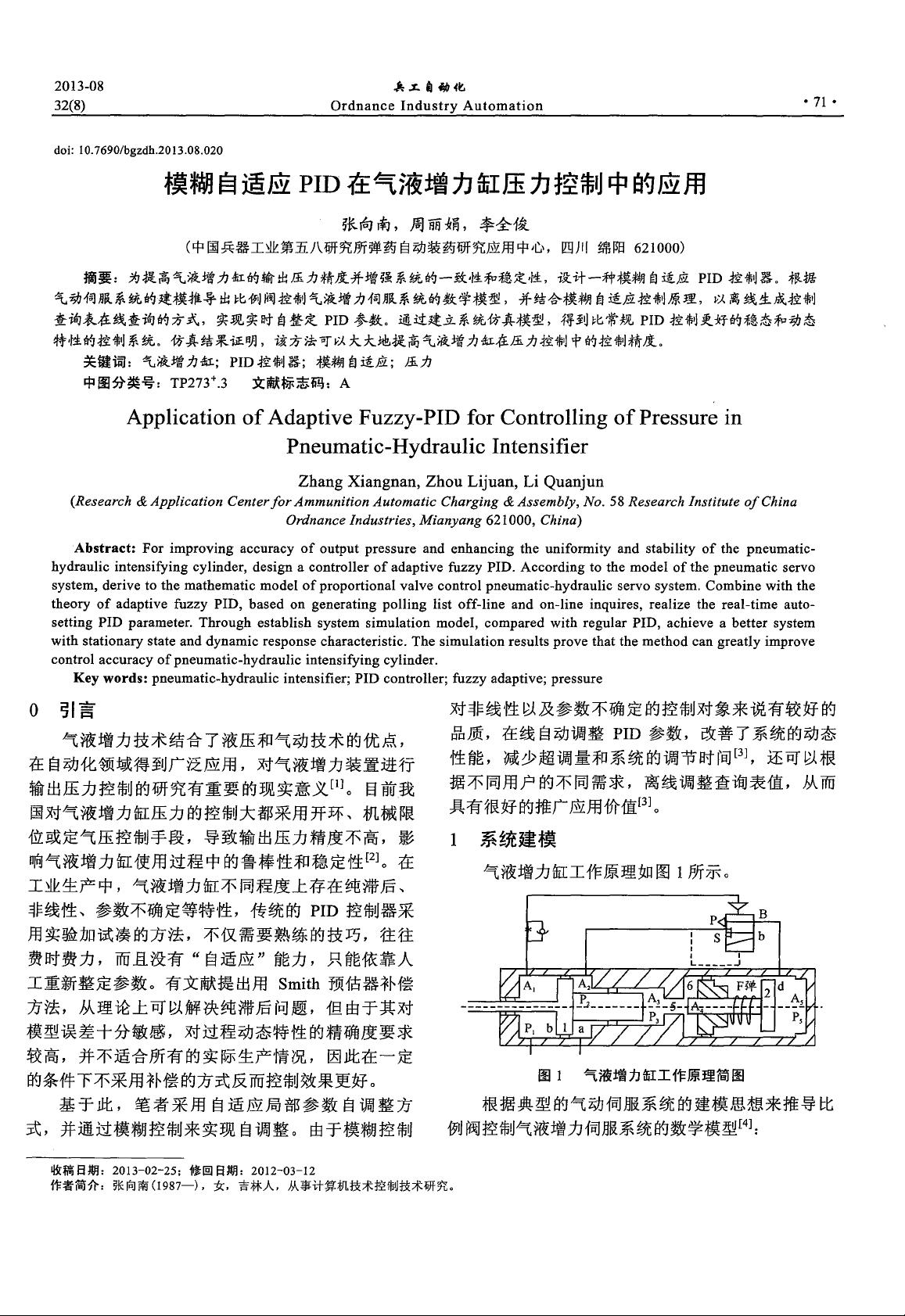
气液增力缸工作原理如图
1
所示。
图
l
气液增力缸工作原理简圈
根据典型的气动伺服系统的建模思想来推导比
例阀控制气液增力伺服系统的数学模型
[4)
:
作者简介:张向南(1
987-)
,女,吉林人,从事计算机技术控制技术研究。
下载后可阅读完整内容,剩余3页未读,立即下载
2021-10-03 上传
2020-02-05 上传
2020-06-30 上传
2022-07-15 上传
2020-06-30 上传
2010-12-28 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38625192
- 粉丝: 4
- 资源: 943
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
