Freescale i.MX 6Linux BSP FlexCAN模块文档
需积分: 10 200 浏览量
更新于2024-07-20
收藏 1.12MB PDF 举报
"i.MX 6Quad 和 i.MX 6Dual Linux GA BSP 文档 API 驱动"
本文档详细介绍了 Freescale Semiconductor 的 i.MX 6 系列处理器,特别是 i.MX 6Quad 和 i.MX 6Dual 上的 Linux 平台支持的通用可用板级支持包 (BSP)。BSP 是一个关键组件,它提供了与硬件交互的底层驱动程序和接口,使得操作系统能够在特定硬件平台上顺畅运行。其中,"driver"标签暗示了这份文档的重点是关于驱动程序开发的。
FlexCAN 模块概述:
FlexCAN 是 Freescale 的控制器局域网络 (CAN) 接口,是一个符合 CAN 规范的高性能模块,常用于汽车电子系统和其他嵌入式应用中。FlexCAN 支持多个通信节点间的可靠数据传输,并具有错误检测和恢复功能。
1. 模块概述:
FlexCAN 模块提供了对 CAN 协议的硬件支持,包括仲裁、错误检测、错误处理和唤醒功能。它能够适应不同的波特率,并且有多种工作模式,如正常模式、睡眠模式和停机模式。
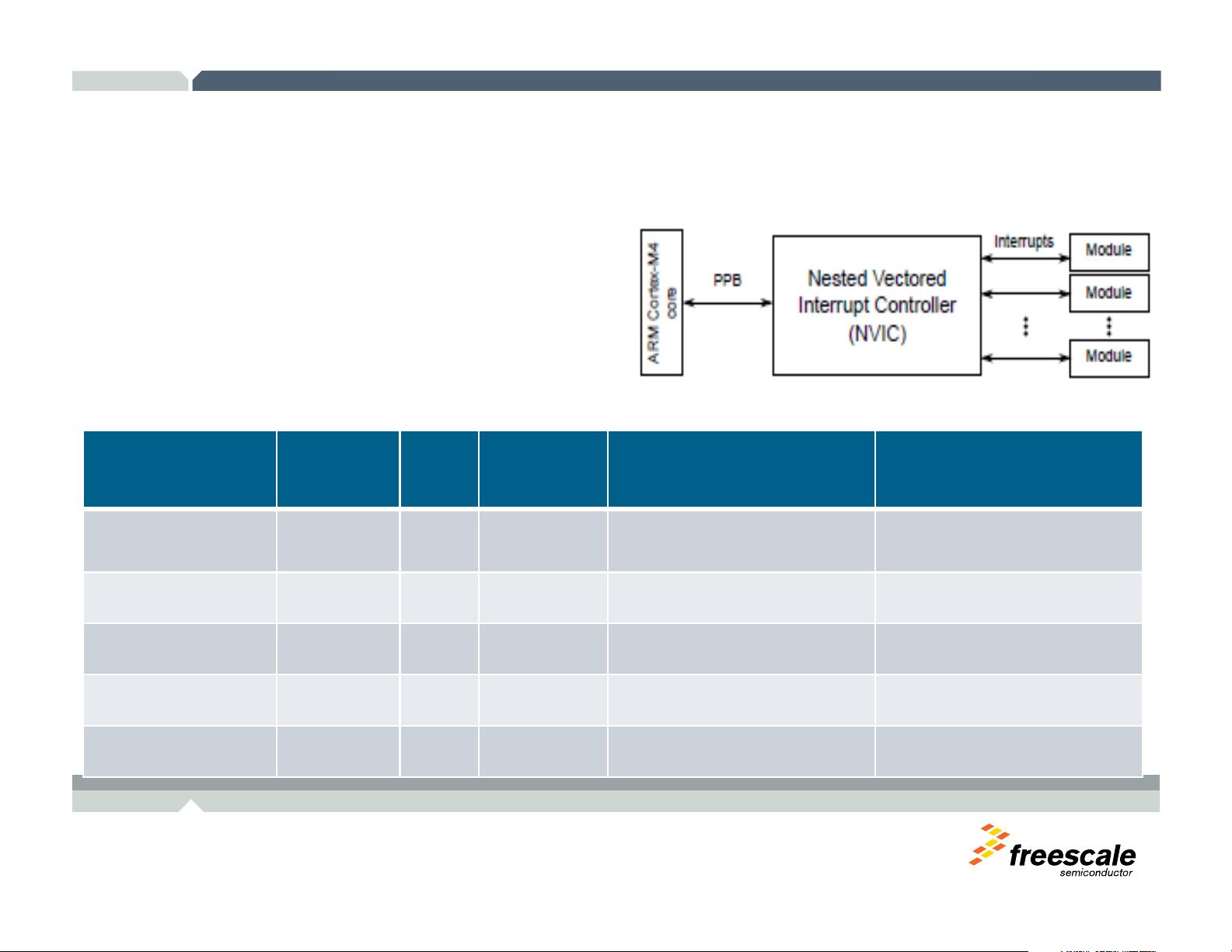
2. 芯片内部互连和模块间依赖:
在 i.MX 6 系列处理器中,FlexCAN 与其他内核组件通过内部总线(如 AHB 或 APB)进行通信。配置和控制 FlexCAN 模块可能涉及到其他系统组件,如中断控制器、时钟管理系统和电源管理单元。
3. 软件配置:
软件配置涉及设置 FlexCAN 寄存器以定义其操作参数,如波特率、接收过滤器、中断使能等。这通常通过 Linux 内核驱动程序完成,该驱动程序提供了一个用户空间接口,允许应用程序配置 FlexCAN 功能。
4. 硬件配置/考虑:
硬件配置涉及到物理连接,如连接到 CAN 总线的线路、外部晶体或振荡器以提供所需的时钟,以及可能的终端电阻以确保信号完整性。还需要正确配置 FlexCAN 模块的电气特性,以适应不同应用场景的电磁兼容性要求。
5. 示例代码解释:
文档可能包含演示如何使用 FlexCAN 驱动的示例代码,这些代码展示了如何初始化 CAN 模块,发送和接收消息,以及处理中断。
6. 常见问题解答:
这部分可能列出了在开发和调试 FlexCAN 驱动程序时遇到的问题及其解决方案,帮助开发者解决实际开发过程中可能遇到的难题。
7. 参考材料:
文档最后会提供相关的参考材料,包括技术规格书、硬件设计指南和其他有助于深入理解 FlexCAN 和 i.MX 6 系列处理器的资源。
这份文档对于那些想要在 i.MX 6 平台上开发基于 FlexCAN 的 CAN 总线通信解决方案的工程师来说,是一份宝贵的参考资料。它涵盖了从硬件接口到软件配置的全面知识,有助于开发者快速有效地集成和优化 CAN 功能。
Module dependencies
I/O configuration
• CAN pins are multiplexed with other peripheral modules via Port Control
Module
• The corresponding CAN pins must be configured as CAN pins by
selecting appropriate ALTn function
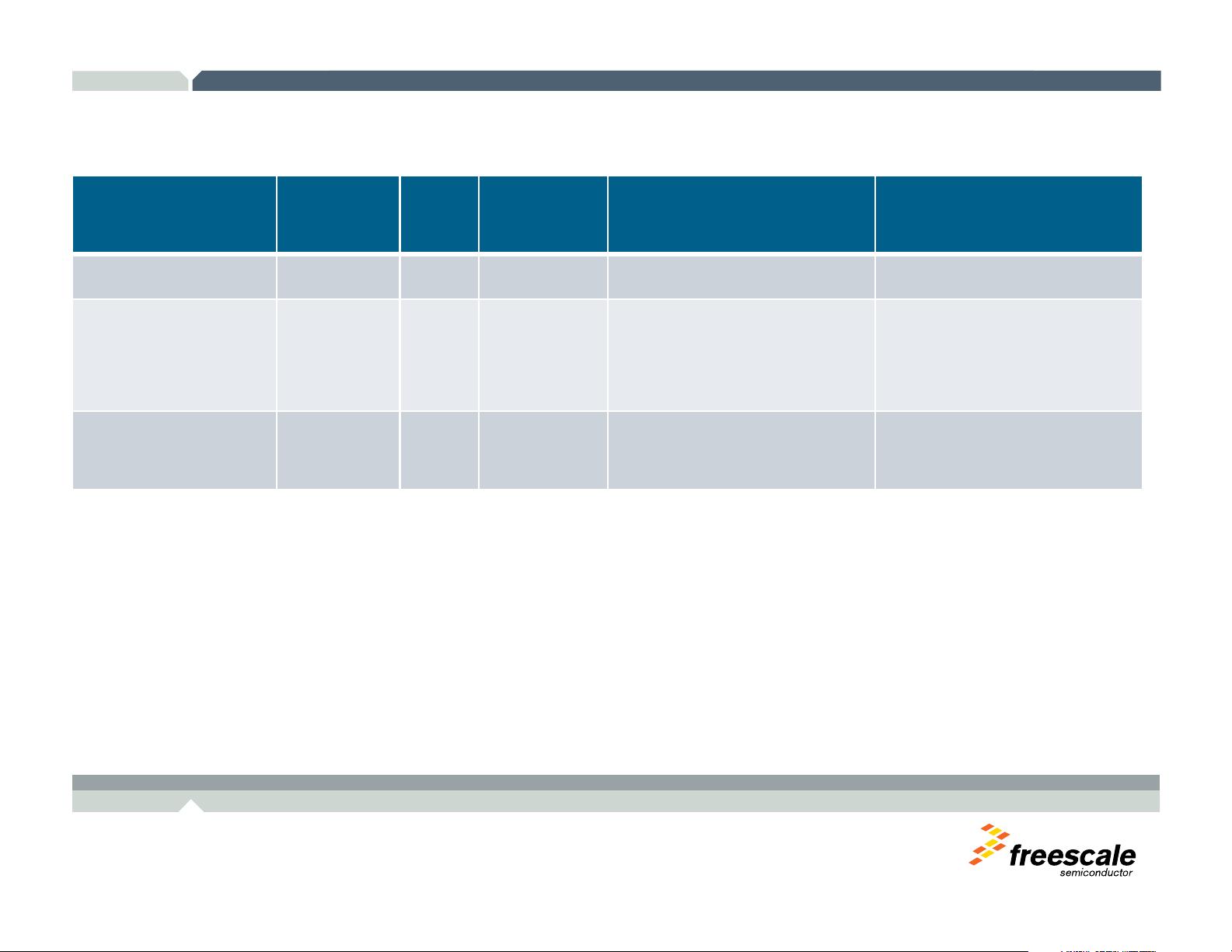
Port Pin name ALT2 Correct Settings for CAN
PTE24
CAN1_TX
PORTE_PCR24[MUX] =2
TM
Freescale Semiconductor Confidential and Proprietary Information. Freescale™ and the Freescale logo are trademarks
of Freescale Semiconductor, Inc. All other product or service names are the property of their respective owners. © Freescale Semiconductor, Inc. 2006.
12
PTE24
CAN1_TX
PORTE_PCR24[MUX] =2
PTE25 CAN1_RX PORTE_PCR25[MUX] =2
PTC16 CAN1_RX PORTC_PCR16[MUX] =2
PTC17 CAN1_TX PORTC_PCR17[MUX] =2
PTA12 CAN0_TX PORTA_PCR12[MUX] =2
PTA13 CAN0_RX PORTA_PCR13[MUX] =2
PTB18 CAN0_TX PORTB_PCR18[MUX] =2
PTB19 CAN0_RX PORTB_PCR19[MUX] =2
剩余74页未读,继续阅读
2009-04-19 上传

hezejining
- 粉丝: 0
- 资源: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- 高清艺术文字图标资源,PNG和ICO格式免费下载
- mui框架HTML5应用界面组件使用示例教程
- Vue.js开发利器:chrome-vue-devtools插件解析
- 掌握ElectronBrowserJS:打造跨平台电子应用
- 前端导师教程:构建与部署社交证明页面
- Java多线程与线程安全在断点续传中的实现
- 免Root一键卸载安卓预装应用教程
- 易语言实现高级表格滚动条完美控制技巧
- 超声波测距尺的源码实现
- 数据可视化与交互:构建易用的数据界面
- 实现Discourse外聘回复自动标记的简易插件
- 链表的头插法与尾插法实现及长度计算
- Playwright与Typescript及Mocha集成:自动化UI测试实践指南
- 128x128像素线性工具图标下载集合
- 易语言安装包程序增强版:智能导入与重复库过滤
- 利用AJAX与Spotify API在Google地图中探索世界音乐排行榜
