ROS在安卓手机上的应用:遥控与多机协同
需积分: 10 107 浏览量
更新于2024-07-19
收藏 2.2MB PPTX 举报
"该资源是关于ROS(机器人操作系统)在安卓设备上应用的介绍,主要涉及ROS与Java的结合以及如何进行多机协同的实践。其中包括ROS机器人竞赛的三个级别:遥控、跟随和自主,以及多机共享协同计算的配置和通信测试方法。"
ROS,全称为Robot Operating System,是一个开源的机器人软件平台,它提供了大量的工具、库和协议,使得开发者能够方便地构建复杂的机器人应用程序。ROS Java是ROS的一个分支,旨在将ROS的功能扩展到Java平台上,这使得开发者可以利用Java语言的强大功能来开发机器人应用,特别是在移动设备如安卓手机上。
在ROS机器人竞赛中,展示了ROS在不同任务中的应用。初级赛是遥控机器人组,参赛者通过手机远程控制机器人沿着设定的红线和蓝线轨迹行驶,限定时间为5分钟。中级赛为跟随机器人组,机器人需能自动跟踪选手的移动,同样沿着指定路线行进,但比赛时间缩短为3分钟。最高级别的比赛是自主机器人组,机器人需完全自主完成任务,沿着轨迹到达终点,时间限制为10分钟。
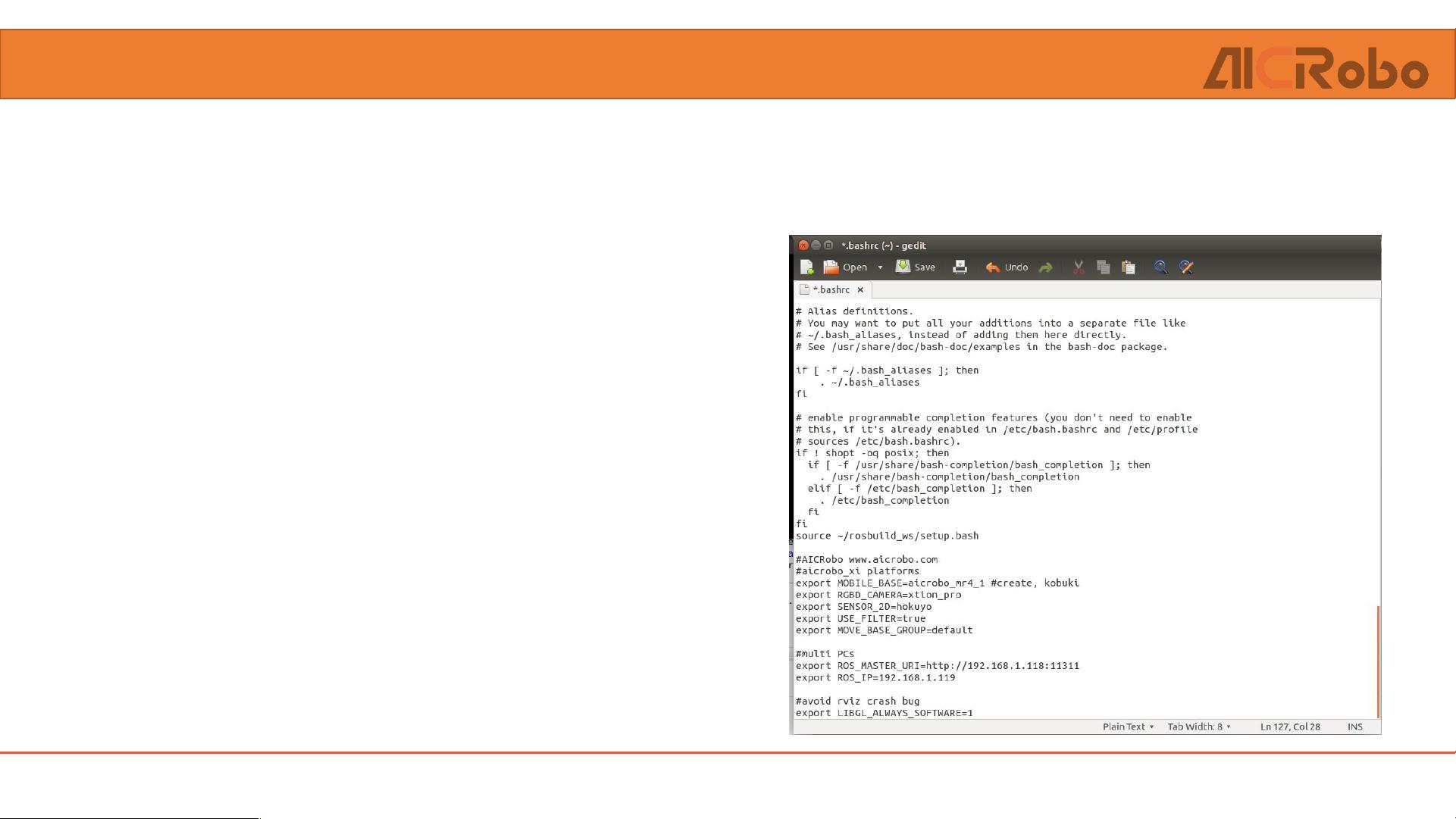
多机共享协同是ROS的一大优势。为了配置多机协同环境,首先需要在主节点(master)上设置ROS_MASTER_URI和ROS_IP,例如设置ROS_MASTER_URI为http://192.168.1.118:11311,并将ROS_IP设置为对应的主机IP。然后,在从机上也需要做同样的设置,但ROS_IP应改为从机的IP地址。完成这些配置后,通过运行`source ~/.bashrc`命令更新环境变量。
通信测试是验证多机协同是否成功的关键步骤。主机(master)启动`roscore`作为核心服务,然后发布一个话题,如使用`rostopic pub`命令发送“Hello World”消息。从机则可以订阅这个话题,以接收并处理来自主机的信息,这样就实现了节点间的通信。
这份资料详细介绍了如何利用ROS Java在安卓设备上实现机器人控制,并提供了多机协同的配置及测试方法,对于理解和实践ROS在移动设备上的应用非常有帮助。
从机配置
开发实践 之 多机共享协同
首先,关闭你所有的终端( ) 关闭 所有 和 启动的窗口 ( )
查看 查看:
打开 文件:
!"#
在 文件后面加入 $%&'$() 和 $)* :
+,$%&'$()-.,/##01233/
+,$)*-01230 (从机的 )* )
保存 文件。然后,打开新的 或者输入:
"#
剩余23页未读,继续阅读
2021-05-29 上传
2021-05-11 上传
2022-09-24 上传
2021-08-11 上传
2021-12-25 上传
2022-04-10 上传

一銤阳光
- 粉丝: 1464
- 资源: 34
 我的内容管理
展开
我的内容管理
展开







最新资源
- NIST REFPROP问题反馈与解决方案存储库
- 掌握LeetCode习题的系统开源答案
- ctop:实现汉字按首字母拼音分类排序的PHP工具
- 微信小程序课程学习——投资融资类产品说明
- Matlab犯罪模拟器开发:探索《当蛮力失败》犯罪惩罚模型
- Java网上招聘系统实战项目源码及部署教程
- OneSky APIPHP5库:PHP5.1及以上版本的API集成
- 实时监控MySQL导入进度的bash脚本技巧
- 使用MATLAB开发交流电压脉冲生成控制系统
- ESP32安全OTA更新:原生API与WebSocket加密传输
- Sonic-Sharp: 基于《刺猬索尼克》的开源C#游戏引擎
- Java文章发布系统源码及部署教程
- CQUPT Python课程代码资源完整分享
- 易语言实现获取目录尺寸的Scripting.FileSystemObject对象方法
- Excel宾果卡生成器:自定义和打印多张卡片
- 使用HALCON实现图像二维码自动读取与解码
