高级视觉伺服技术:MATLAB实现与机器人应用
需积分: 21 124 浏览量
更新于2024-07-19
收藏 1.35MB PDF 举报
"Robotics__Vision_and_Control_Fundamental_Algorithms_in_MATLAB英文版第16章-高级视觉伺服"
本章是机器人大师Peter Corke的经典著作中的一个章节,聚焦于高级视觉伺服技术及其应用。书中内容广泛,涵盖了工业机器人、移动机器人、飞行器、机器视觉以及机器人控制等多个领域,并提供了MATLAB机器人工具箱和机器视觉工具箱的实际代码示例,是深入研究机器人科学的理想入门资料。
16章主要分为几个部分:
1. 部分16.1介绍了一种混合视觉伺服方法,这种方法旨在克服之前描述的图像基向量伺服(IBVS)和位置基向量伺服(PBVS)方案的一些局限性。这种混合方法可能更有效且适应性更强,能够处理不同场景下的伺服控制问题。
2. 针对广角相机,如鱼眼镜头和猫眼镜头,它们在视觉伺服中有显著优势。16.2节介绍了如何将IBVS重构成以极坐标而非笛卡尔坐标表示的图像平面坐标系统。这不仅适用于鱼眼镜头,而且在使用透视相机时也能提供改进的旋转控制。利用11.4节提出的统一成像模型,大多数类型的相机(透视、鱼眼和猫眼)可以通过球面投影模型来表示。
3. 在16.3节中,作者进一步展示了如何将IBVS重新构架为球坐标系,这对于各种相机类型的应用具有广泛的适用性,增强了视觉伺服的灵活性和精度。
4. 之后的部分通过一系列应用示例展示了视觉伺服在不同类型的相机(透视和球面)以及不同类型的机器人(臂式机器人、地面移动机器人和飞行机器人)上的实际应用。16.4节关注的是具有6个自由度的机器人臂,展示了视觉伺服如何在这种复杂系统中实现精确控制。
这些内容深入浅出地探讨了视觉伺服的关键技术和实际应用场景,对于想要在机器人控制领域深化理解的读者来说极具价值。通过MATLAB的实践代码,读者可以亲自模拟和实现这些算法,从而增强理论知识与实际操作的结合。
483
>> sim('sl_partitioned')
and the camera pose, image plane feature error and camera velocity are animated.
Scope blocks also plot the camera velocity and feature error against time.
If points are moving toward the edge of the field of view the simplest way to keep them
in view is to move the camera away from the scene. We define a repulsive force that acts on
the camera, pushing it away as a point approaches the boundary of the image plane
where d(p) is the shortest distance to the edge of the image plane from the image
point p, and d
0
is the width of the image zone in which the repulsive force acts, and
η is a scalar gain coefficient. For a W × H image
(16.4)
The repulsion force is incorporated into the z-axis translation controller
where η is a gain constant with units of damping. The repulsion force is discontinuous
and may lead to chattering where the feature points oscillate in and out of the repul-
sive force – this can be remedied by introducing smoothing filters and velocity limiters.
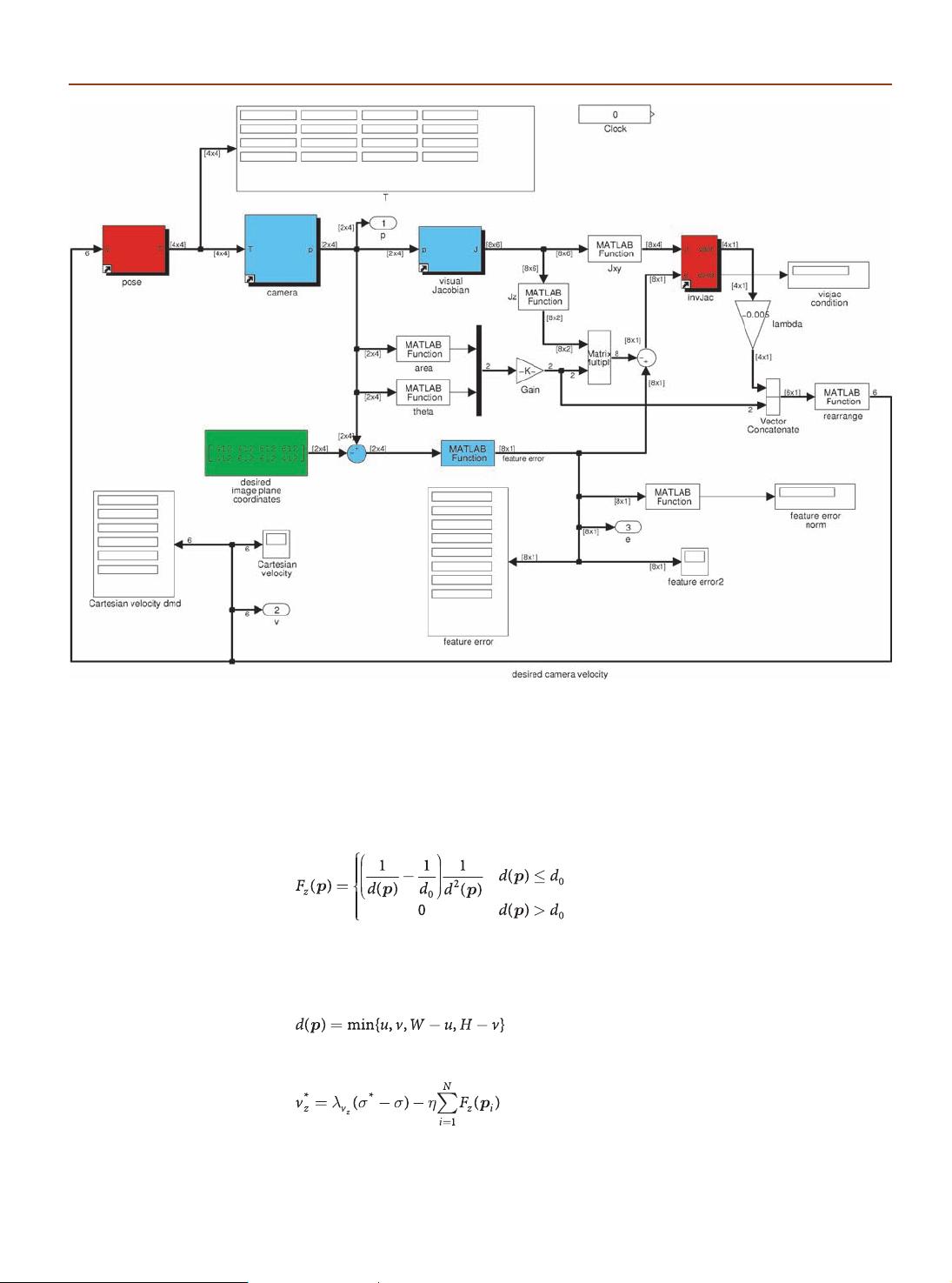
Fig. 16.2. The Simulink® model
sl_partitioned is an XY/Z-
partitioned visual servo scheme,
an extension of the IBVS system
shown in Fig. 15.9. The initial
camera pose is set in the pose
block and the desired image plane
points p
*
are set in the green con-
stant block
16.1 · XY/Z-Partitioned IBVS
剩余14页未读,继续阅读
2018-03-06 上传
2018-03-06 上传
2018-03-06 上传
2018-03-06 上传
2018-03-06 上传
2017-12-23 上传

qq_14903801
- 粉丝: 5
- 资源: 25
 我的内容管理
展开
我的内容管理
展开







最新资源
- 平尾装配工作平台运输支撑系统设计与应用
- MAX-MIN Ant System:用MATLAB解决旅行商问题
- Flutter状态管理新秀:sealed_flutter_bloc包整合seal_unions
- Pong²开源游戏:双人对战图形化的经典竞技体验
- jQuery spriteAnimator插件:创建精灵动画的利器
- 广播媒体对象传输方法与设备的技术分析
- MATLAB HDF5数据提取工具:深层结构化数据处理
- 适用于arm64的Valgrind交叉编译包发布
- 基于canvas和Java后端的小程序“飞翔的小鸟”完整示例
- 全面升级STM32F7 Discovery LCD BSP驱动程序
- React Router v4 入门教程与示例代码解析
- 下载OpenCV各版本安装包,全面覆盖2.4至4.5
- 手写笔画分割技术的新突破:智能分割方法与装置
- 基于Koplowitz & Bruckstein算法的MATLAB周长估计方法
- Modbus4j-3.0.3版本免费下载指南
- PoqetPresenter:Sharp Zaurus上的开源OpenOffice演示查看器
