SLAM技术详解:从特征提取到点云生成
需积分: 46 132 浏览量
更新于2024-07-09
1
收藏 21.99MB PDF 举报
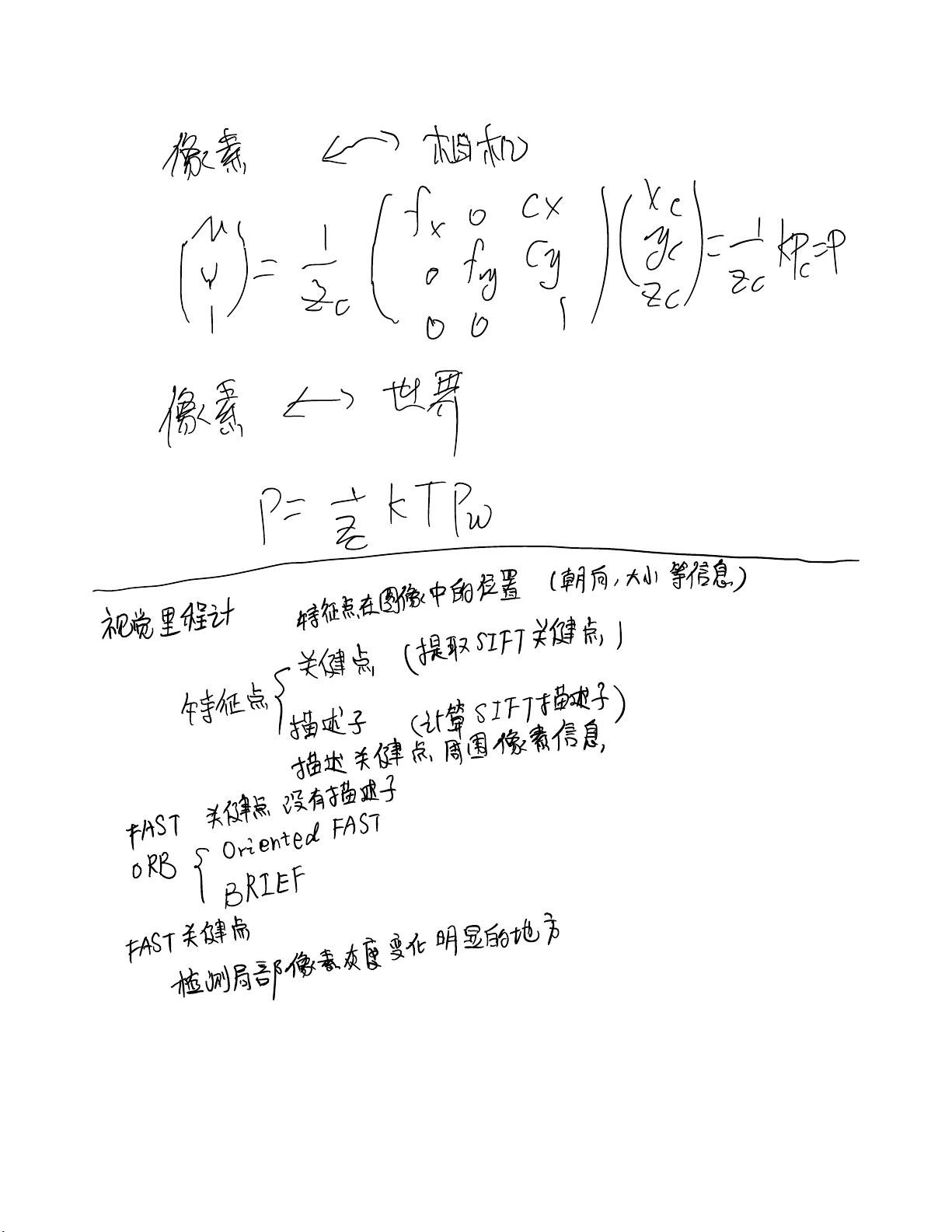
"这篇文章主要介绍了SLAM(Simultaneous Localization And Mapping,同时定位与建图)技术中的关键步骤,包括相机像素坐标转换、特征提取、匹配以及定位与建图的基本概念。"
在SLAM领域,相机是获取环境信息的主要传感器。相机通过像素坐标系与世界坐标系之间的转换来理解周围环境。相机类型包括单目相机和深度相机,其中深度相机能直接测量物体与相机间的距离,基于结构光或飞行时间原理工作。
视觉SLAM框架通常分为前后两端。前端主要负责传感器数据的处理,例如视觉里程计的计算,它利用图像序列中的像素运动来估计相机的运动。这个过程中涉及的关键技术包括特征点的检测和描述,如SIFT (Scale-Invariant Feature Transform)、ORB (Oriented FAST and Rotated BRIEF) 等。这些特征点不仅包含位置信息,还可能包含方向和大小等特征,使得它们在不同视角下依然可识别。
特征匹配是将不同图像帧中的特征点对应起来的过程,常使用KNN (K-Nearest Neighbors) 或FLANN (Fast Library for Approximate Nearest Neighbors) 算法。2D-2D匹配指的是在二维图像平面上找到对应的特征点,而PnP (Perspective-n-Point) 算法则用于从2D特征点估计3D空间中的点位置。ICP (Iterative Closest Point) 算法常用于优化配对点之间的对应关系,提高定位精度。
后端则负责全局一致性优化,包括线性优化和非线性优化,通过图像之间的相似性来校正位姿估计的误差,确保建图的准确性。例如,使用BA (Bundle Adjustment) 来联合优化相机参数和地图点的位置,以最小化重投影误差。
在SLAM中,坐标系转换是非常重要的一环,例如从世界坐标系到相机坐标系,再到图像坐标系的转换。相机的内参矩阵包含了焦距、主点坐标等信息,而外参矩阵描述了相机在世界坐标系中的位置和姿态。右手规则用于确定坐标轴的方向,帮助我们理解旋转和平移操作。
SLAM技术旨在解决移动机器人或无人设备在未知环境中实时定位和构建地图的问题。从特征提取到生成点云,SLAM涉及到多个复杂步骤,每个环节都至关重要,共同构成了实现自主导航的基础。通过不断优化和改进这些技术,我们可以期待未来在自动驾驶、无人机、增强现实等领域看到更精确、更可靠的表现。
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
像素
也
相机
联
𠠬
𧈛
脚
像素
⼀
世界
FÈKTPW
视觉
⾥程
计
特征
点
在
图像
中
的
位置
朝向
⼤⼩
等
信息
⼀
⼀
特征
点
关
健
点
提取
听
关
健
点
描述
⼦
计算
SIFT
描述
⼦
描述
关键点
周围
像素
信息
FAST
关键点
没有
描述
⼦
ORB
Oriented
FAST
BRIEF
FAST
关
健
点
检测
局部
像素
灰
度
变化
明显
的
地⽅
剩余24页未读,继续阅读
415 浏览量
2024-05-12 上传
153 浏览量
1116 浏览量
128 浏览量
193 浏览量
530 浏览量
415 浏览量

小负不负
- 粉丝: 1278
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- 03_BuildingEscape:一个简单的第一人称游戏,用于学习关卡构建,照明,虚幻编辑器,C ++游戏逻辑,基本蓝图等。 (参考:BE_URC)http:gdev.tvurcgithub
- 西门子ET_200L +6 ES7_132产品外形图.zip
- 影刀RPA系列公开课2:桌面软件自动化-软件窗口的操作.rar
- ds-recruitment:包含有关DataSift招聘任务的支持代码
- Overfoldix-开源
- practice_algorithm
- commute_bot2-discord:출퇴근봇新
- 大气的投资咨询公司整站html模板.zip
- DeepPath:我的EMNLP论文“ DeepPath:知识图推理的强化学习方法”的代码和文档
- selection-api:选择API
- 影刀RPA系列公开课1:桌面软件自动化-软件元素的操作.rar
- dsr-api:使用jsDelivr的DSR项目的静态模拟API
- STAP.zip_STAP_空时信号处理_空时处理_空时自适应STAP_空时阵列信号
- api-docs:Paylike API文档
- PASSIM-开源
- Httpfake – Golang httptest包装器,可轻松设置伪造的服务器-Golang开发
