51单片机控制舵机原理与程序实现解析
需积分: 18 169 浏览量
更新于2024-09-21
收藏 323KB PDF 举报
"舵机原理应用和51单片机程序详解"
本文主要讲解了舵机的基本原理、工作方式以及如何使用51单片机进行控制。舵机是一种常见于航模、机器人领域的伺服驱动器,因其结构紧凑、易于操控而广泛应用。舵机的最大力矩和工作速度是衡量其性能的关键指标。
舵机的内部结构包括电源线、地线和控制信号线。控制信号线通过改变脉冲宽度调制(PWM)信号的占空比来调整舵机的输出角度。一个标准的舵机脉冲周期为20毫秒,其中脉冲宽度在0.5至2.5毫秒之间变化,对应的舵机转角范围是0°到180°。
51单片机控制舵机的关键在于生成正确的PWM信号。首先,单片机需要生成一个固定周期为20毫秒的基础PWM信号。然后,通过改变这个PWM信号的高电平时间(占空比),可以精确控制舵机的转动角度。例如,当脉冲宽度为1.5毫秒时,舵机会转动到90°的位置。
在编写51单片机控制程序时,通常会使用定时器中断来实现PWM信号的生成。设定定时器的初值,使其在20毫秒内溢出,触发中断,然后在中断服务子程序中调整PWM信号的占空比。此外,还需要一个变量来存储目标脉冲宽度,并在每次中断时根据这个变量调整PWM信号的高电平时间。
实际应用中,为了实现对多个舵机的控制,可以设置多个定时器或者通过轮询方式切换控制不同的舵机。同时,还需要考虑电机驱动电路的设计,确保足够的电流供应,以驱动舵机正常工作。
总结来说,理解舵机的工作原理和51单片机的PWM控制机制是实现精准机械运动控制的基础。通过编程和适当的硬件设计,可以利用51单片机精确控制舵机的角度,从而实现各种复杂的自动化操作。在机器人和模型制作领域,这种控制技术有着广泛的应用。
www.txmcu.com 舵机原理应用及程序详解 哈尔滨天祥电子
舵机原理应用程序详解
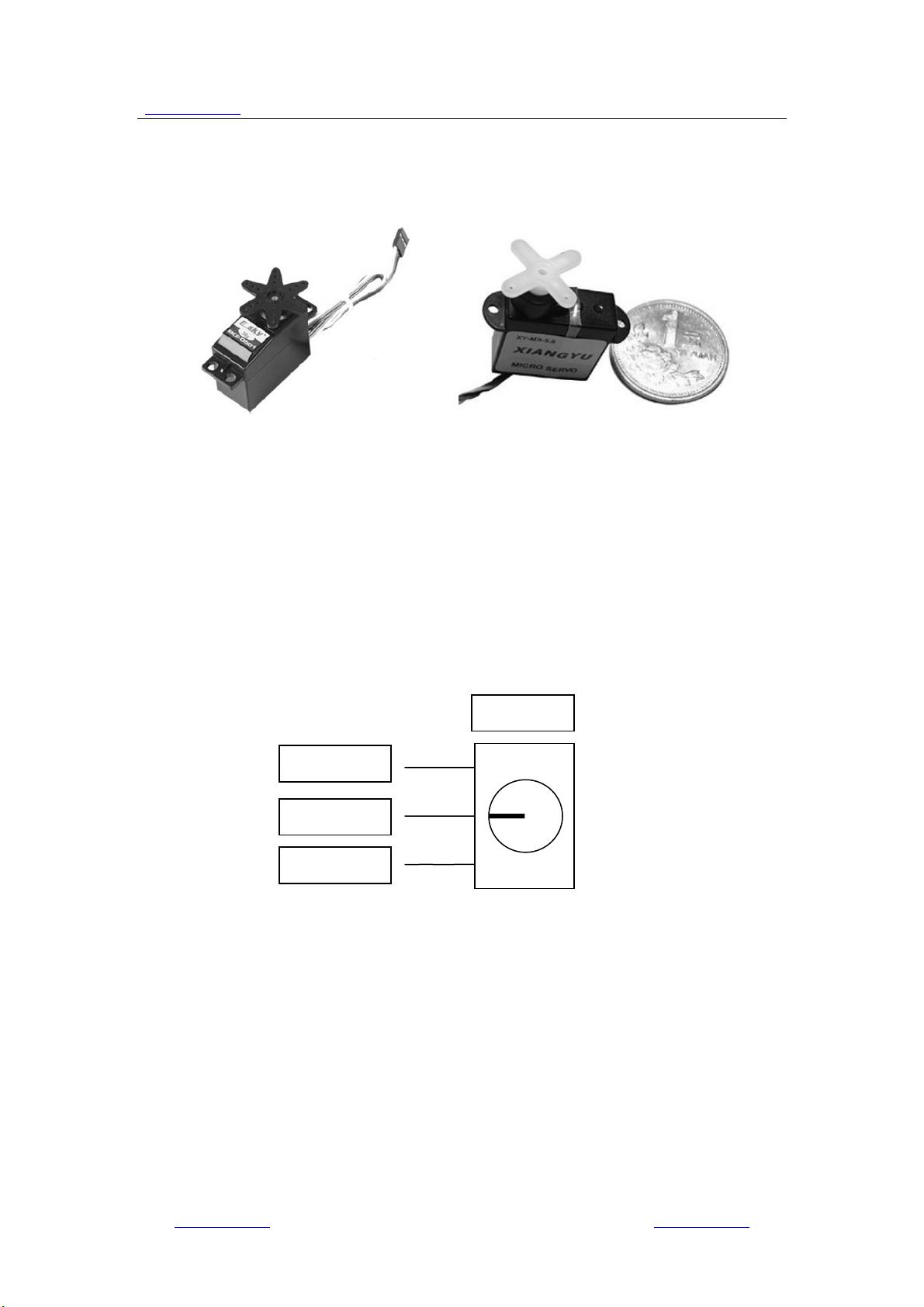
1、舵机实物图片
图 1 普通航模用舵机 图 2 微型舵机
2、舵机介绍
舵机英文叫 Servo,也称伺服机。其特点是结构紧凑、易安装调试、控制简单、大扭力、
成本较低等。舵机的主要性能取决于最大力矩和工作速度(一般是以秒/60°为单位)。它是一
种位置伺服的驱动器,适用于那些需要角度不断变化并能够保持的控制系统。在机器人机电
控制系统中,舵机控制效果是性能的重要影响因素。舵机能够在微机电系统和航模中作为基
本的输出执行机构,其简单的控制和输出使得单片机系统很容易与之接口。
3、舵机的工作原理
标准的舵机有 3 条引线,分别是:电源线 Vcc、地线 GND 和控制信号线,如图 3 所示。
地线 GND
电源线 Vcc
控制信号线
输出转轴
图 3 标准舵机引线示意图
在航模遥控系统中,控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。
他内部有一个基准电路,产生周期为 20ms,宽度为 1.5ms 的基准信号,将获得的直流偏置
电压和电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定
电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为 0,
电机停止转动。其实我们可以不用去了解它内部的具体工作原理,知道它的控制原理就够了。
就象我们使用三极管一样,知道可以拿它来做开关管或放大管就行了,至于管内的电子具体
怎么流动是可以完全不用去考虑的。舵机的控制信号也是 PWM 信号,利用占空比的变化改
变舵机的位置。图 4 为舵机输出转角与输入信号脉冲宽度的关系,其脉冲宽度在 0.5~2.5ms
之间变化时,舵机输出轴转角在 0°~180°之间变化。
www.txmcu.com 1 www.txmcu.com
下载后可阅读完整内容,剩余6页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2012-04-29 上传
2012-05-11 上传
2020-07-15 上传
2020-06-17 上传
2023-09-12 上传
2010-12-28 上传

xjk840565883
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- codezhifty
- jahresmeisterschaft_fsb:该程序用于评估射击俱乐部“FeldschützengesellschaftBolligen”的年度冠军(Jahresmeisterschaft)
- fm-contour-mapper:美国调频频谱互动图
- r4ioos:R的自动化和报告演示
- 记录用python实现的机器学习算法.zip
- DataMiningAlgorithms
- TodoList:这是一个包含搜索栏的待办事项列表
- 小轩菜单工具易语言源码-易语言
- POLS6480-Fall2020-UH-家庭作业
- Python库 | requests_ntlm-1.1.0-py2.py3-none-any.whl
- DailyCodingProblem
- Maze_Java
- 记录学习Python Web 框架 Flask的代码.zip
- FizzBuzzStrategy:具有Strategy模式的FizzBuzz实现
- PasswdSafe-开源
- node-ruby-sass
